Information Technology Reference
In-Depth Information
R
11
:IF(
S
[
t
]
is
q
1
R
22
:IF(
S
[
t
]
is
q
2
)
∨
(
a
x
is
S
a
x
)
∨
(
a
y
is
M
a
y
)
∨
(
d
2
is
T
st ay
2
)THEN
S
[
t
+
1
]
is
q
2
R
33
:IF(
S
[
t
]
is
q
3
)
∨
(
a
x
is
B
a
x
)
∨
(
a
y
is
S
a
y
)
∨
(
d
3
is
T
st ay
3
)THEN
S
[
t
+
1
]
is
q
3
R
44
:IF(
S
[
t
]
is
q
4
)
∨
(
a
x
is
S
a
x
)
∨
(
a
y
is
M
a
y
)
∨
(
d
4
is
T
st ay
4
)THEN
S
[
t
+
1
]
is
q
4
R
12
:IF(
S
[
t
]
is
q
1
)
∨
(
a
x
is
S
a
x
)
∨
(
a
y
is
M
a
y
)
∨
(
d
1
is
T
change
1
)THEN
S
[
t
+
1
]
is
q
2
R
23
:IF(
S
[
t
]
is
q
2
)
∨
(
a
x
is
B
a
x
)
∨
(
a
y
is
S
a
y
)
∨
(
d
2
is
T
change
2
)THEN
S
[
t
+
1
]
is
q
3
R
34
:IF(
S
[
t
]
is
q
3
)
∨
(
a
x
is
S
a
x
)
∨
(
a
y
is
M
a
y
)
∨
(
d
3
is
T
change
3
)THEN
S
[
t
+
1
]
is
q
4
R
41
:IF(
S
[
t
]
is
q
4
)
∨
(
a
x
is
B
a
x
)
∨
(
a
y
is
B
a
y
)
∨
(
d
4
is
T
change
4
)THEN
S
[
t
+
1
]
is
q
1
is
q
1
)
∨
(
a
x
is
B
a
x
)
∨
(
a
y
is
B
a
y
)
∨
(
d
1
is
T
st ay
1
)THEN
S
[
t
+
1
]
Fig. 11.3
State diagram of the FFSM for the human gait cycle
1.8
1.6
1.4
1.2
1
a
x
s
1
s
2
s
3
s
4
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
t (s)
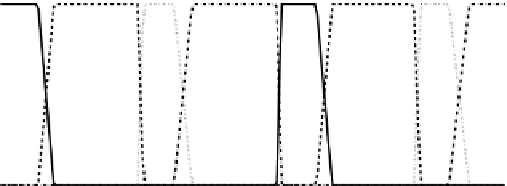
Fig. 11.4
Graphical representation of the state activation vector (
S
[
t
]
) of the four states to-
gether with the evolution of dorso-ventral acceleration (
a
x
)