Image Processing Reference
In-Depth Information
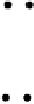
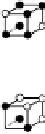
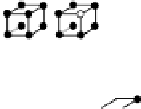
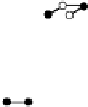
Fig. 4.5.
Simplexes in a 3D figure: Black circles show 1-voxels and white ones 0-
voxels. In the 18
-connectivity case a pattern with
is added to the 6-connectivity
case, and only the pattern with
∗∗
is considered as a 3D simplex.
∗
(1) 0-simplex = each of 1-voxels.
(2) 1-simplex = pair of two 1-voxels neighboring each other.
(3) 2-simplex = a set of three 1-voxels, any one of which is adjacent to the
remaining two voxels, or a set of four voxels that exist on the same plane
and any one of which is adjacent to two of the remaining three voxels.
(4) 3-simplex = a set of four 1-voxels, any one of which is adjacent to all of
the remaining three voxels, or a set of five or more 1-voxels that do not
exist on the same plane and make a closed polyhedron with the minimum
number of faces.
The 1-, 2-, and 3-simplexes are called
edge element
,
face element
,and
volume element
, respectively. Concrete forms of simplexes vary according to
the type of the connectivity. We show in Fig. 4.5 all of the different possible
simplexes for four types of connectivity.
Let us assume that a figure is given in the 3D space and let us express
this figure as the set sum of simplexes. This expression in the form of the set
sum is called
simplicial decomposition
if it satisfies the following requirements
(Fig. 4.6).
(1) Neighboring two face elements share only one common 1-voxel or share
only one common edge element.
(2) Connections between a face element and an edge element happen either
in the form that one of vertexes of the edge element coincides with one of
vertexes of the face element or that the edge element coincides with one
of edges of the face element.





























































































































































































































Search WWH ::

Custom Search