Image Processing Reference
In-Depth Information
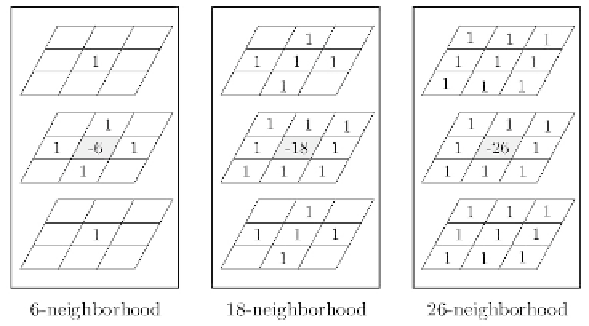
Fig. 3.4.
Examples of a weight function of 3D Laplacian.
Table 3.1.
A Laplacian on the 3D 26-neighborhood.
Element filter (assuming
r
=
1
)
(1) The form of
g
ijk
=
f
i−
1
,j,k
+
f
i
+1
,j,k
−
2
f
ijk
(three directions)
(2) The form of
g
ijk
=
f
i−
1
,j−
1
,k
+
f
i
+1
,j
+1
,k
−
2
f
ijk
(six directions)
(3) The form of
g
ijk
=
f
i−
1
,j−
1
,k−
1
+
f
i
+1
,j
+1
,k
+1
−
2
f
ijk
(four directions)
→
6-neighbor Laplacian
Sum of 9 element filters of (1) and (2)
→
18-neighbor Laplacian
Sum of 13 element filters of (1), (2) and (3)
→
27-neighbor Laplacian
Sum of 3 element filters
(
i, j, k
). For instance, 2D filters on planes (
i
=
i
1
)and(
i
=
i
+
1
)are
applied first, and then the sum of their outputs may be considered as the
output at the voxel (
i, j, k
). Even if 2D filters are omnidirectional, a resulting
3D filter may become directional, if we employ only one pair of planes. On
the contrary, a resulting 3D filter may become omnidirectional even if we use
directional ones in 2D planes.
Figure 3.5 shows an example of a 3D difference filter derived from a pair of
two 2D 4-neighbor Laplacians. The obtained 3D filter is directional, because
only one pair of filters arranged in the
k
-direction is employed there. Note
here that both 2D filters are omnidirectional in 2D planes.
Other examples are illustrated in Figs. 3.6 and 3.7. Those in Fig. 3.6 were
derived from 2D Sobel filters. The Sobel filter in Fig. 3.7 was derived directly
from a 3D image. Examples of operators for edge detection in a 3D image are
given in Table 3.2.
−
Remark 3.10.
The directional characteristics of 2D and 3D filters in synthe-
sizing 3D ones from 2D ones are as follows:
(i) (2D, directional)
→
(3D, directional)
→
(3D, omnidirectional)
Search WWH ::

Custom Search