Image Processing Reference
In-Depth Information
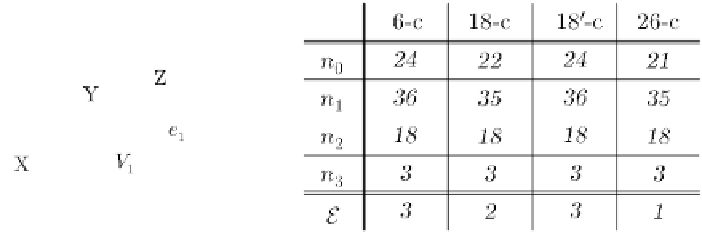
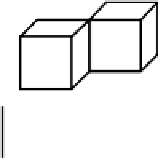
Fig. 4.11.
Example of the triangulation method for calculating Euler number. Let
us consider a figure consisting of three voxels X, Y and Z shown here. Their values of
n
k
s in 4.7.1 are given as the table above corresponding to each type of connectivity.
For example,
n
0
is the number of vertices in this figure. Each voxel (a cube) has
eight vertices. Therefore, the number of vertices in this figure
n
0
is
24
(=
8
×
3
)
for the 6-c case. In the 26-c case, voxels X and Y are connected and the vertex
V
1
is not a vertex of this figure. The edge
e
1
is not the edge of the figure, because
V
1
and
e
1
are inside the figure in the 26-c case. For details, see [Gray71, Toriwaki02a].
Then, the amount of the contribution
∆
E
(
V
) to the Euler number
E
at the
vertex
V
is given by,
∆
E
(
V
)=
∆n
0
−
∆n
1
+
∆n
2
−
∆n
3
.
(4.41)
The Euler number
E
is obtained by adding
∆
E
(
V
) of all vertexes in a 3D
object, that is,
=
V
E
∆
E
(
V
)
.
(4.42)
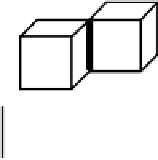
The type of connectivity should be taken into consideration again in the sim-
ilar way as was presented in Fig. 4.11. An example is shown in Fig. 4.12.
The value of
∆
E
(
V
) defined above is uniquely determined by the configu-
ration of 1-voxels in
(
V
). Since there are
256
possible configurations and by
considering various symmetric relations it is known that only
22
among them
are different patterns, the value of
∆
S
(
V
) for each configuration can be cal-
culated beforehand and stored in the form of a table. Thus, the computation
of the Euler number is reduced to the iterative table searches and additions.
All of possible
2
E
×
×
2
2
configurations are shown in Table 4.4 with values of
∆
E
(
V
).
An ecient algorithm to find which pattern among these
22
cases a given
2
×
2
×
2
subpattern corresponds to is given as follows.
Algorithm 4.1.
Denote the number of 1-voxels in
S
(
V
)by
n
0
. Then the value
of the contribution to the Euler number
(
V
)atthevertex
V
is determined
by the flowchart in Fig. 4.13 and Table 4.4.
E










Search WWH ::

Custom Search