Geoscience Reference
In-Depth Information
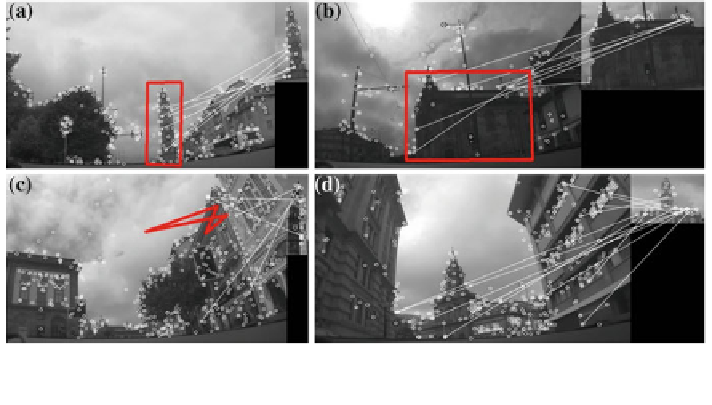
Fig. 2 Image analysis results. a and b are true positives; c is a false positive; d similar buildings
could generate mistakes but the algorithm performed correctly
quadrilateral (as observed in Fig.
2
a, b). In this method context, it is acceptable to
discard a true positive, because over a route and for a single POI it is expected
several true positive detections, but it is not so good not to discard a false positive,
because over a route only one positive is necessary to con
rm the geolocation (the
method trusts the CV component).
3 Testing Prototype
3.1 Architecture Overview
Conceptually, the proposed method was instantiated through a system architecture
composed of three logical modules: media, GPS and server modules. Figure
3
illustrated the three modules as well as the interaction between them.
The Media module is composed by a camera (or set of cameras), properly
con
gured to provide access to one or more video streams (sets of video frames). It
is important that these cameras are strategically placed in the vehicle, in order to
obtain a clear view of the outside landscape. If this module is composed by only
one camera, it should be positioned in the front of the vehicle and pointing forward,
so the requested images may display a reference point before passing by it. If this
module is composed by more than one camera, then only one of these cameras must
be placed as above described, and the others may be placed in order to complement
the video capture of the
first one. In our prototype, the media module used a video
camera Axis M3114-R. The GPS module is composed by a GPS receiver. This
receiver must be steady, in order to guarantee that an eventual lack of accuracy of
the GPS information is only resultant of the signal reception itself, and not from the
Search WWH ::

Custom Search