Geoscience Reference
In-Depth Information
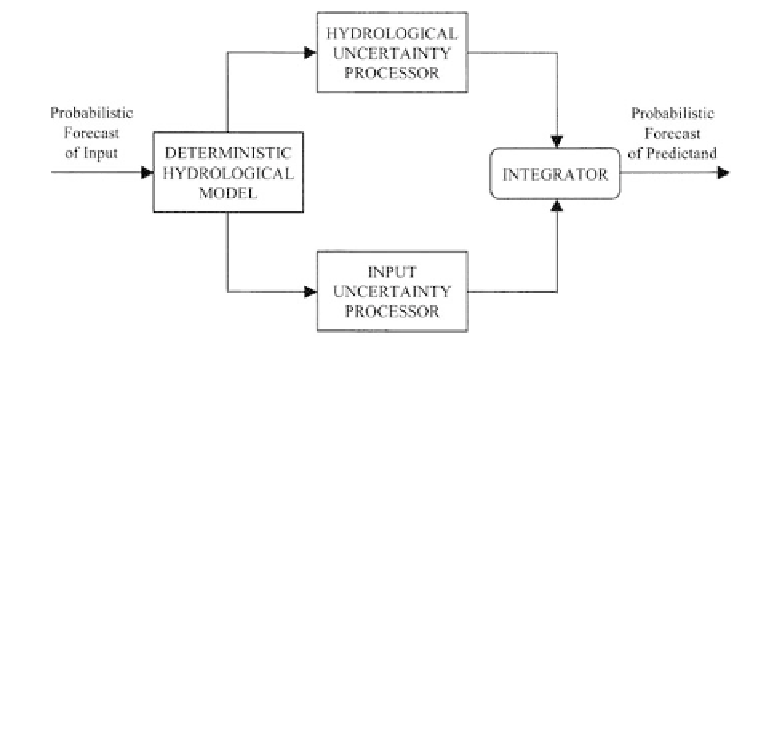
consisting of the input uncertainty processor, hydrological uncertainty processor and
integrator is illustrated in Figure 3.4. The input uncertainty processor by the name of
precipitation uncertainty processor (PUP) was further elaborated by Kelly and
Krzysztofowicz (2000), and the hydrological uncertainty processor (HUP) by
Krzysztofowicz and Kelly (2000). Similarly, the integrator was further exemplified by
Krzysztofowicz (200 1b).
Figure 3.4.
Structure of the Bayesian forecasting system (source:
Krzysztofowicz, 1999).
3.3.2
Generalised likelihood uncertainty estimation (GLUE)
First introduced by Beven and Binley (1992), the generalised likelihood uncertainty
estimation (GLUE) method reformulates the model calibration problem as the estimation
of posterior probabilities of model responses (Romanowicz and Beven, 1998). The
posterior probabilities of the parameter sets are determined using the Bayesian theory as
(Box and Tiao, 1973)
(3.27)
where
z
is the vector of observations,
f
(
#
|
z
) is the posterior distribution (probability
density) of the sets of parameter values
#
given the data,
f
(
#
) is the prior probability
density of the parameter sets,
f
(
z
) is a scaling factor and
L
(
#
|
z
) is a likelihood function
for the parameter set
#
given the observation set
z
obtained from the forward modelling.
This form assumes that the data
z
are fixed at their observed values while the parameters
sets
#
are treated as random variables (Wetherill, 1981). This allows the introduction of
prior distributions for the parameters (Romanowicz and Beven, 1998).
As the new data become available, Equation (3.27) can be applied sequentially taking
the existing posterior distributions (based on
n
!1 calibration periods) as the prior for the
new data in the
n
th
calibration period. That is

Search WWH ::

Custom Search