Image Processing Reference
In-Depth Information
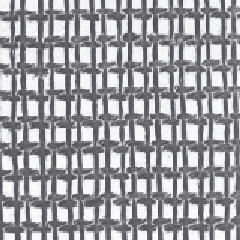
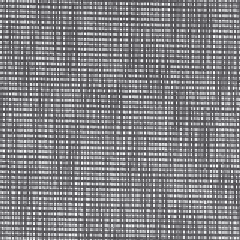
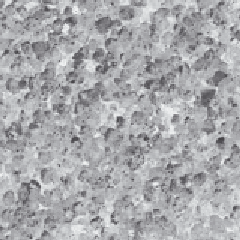
pictures of textures (Brodatz, 1968), produced for artists and designers, rather than for
digital image analysis. Parts of three of the Brodatz texture images are given in Figure
8
.
2
.
Here, the French canvas (Brodatz index D20) in Figure
8
.
2
(a) is a detail of Figure
8
.
2
(b)
(Brodatz index D21) taken at four times the magnification. The beach sand in Figure
8
.
2
(c), (Brodatz index D29) is clearly of a different texture to that of cloth. Given the
diversity of texture, there are now many databases available on the Web, at the sites given
in Chapter 1 or at this topic's website. Alternatively, we can define texture as a quantity for
which texture extraction algorithms provide meaningful results. One study (Karru, 1996)
suggests
The answer to the question 'is there any texture in the image?' depends not only on
the input image, but also on the goal for which the image texture is used and the
textural features that are extracted from the image.
(a) French canvas (detail) D20
(b) French canvas D21
(c) Beach sand D29
Figure 8.2
Three Brodatz textures
Essentially, there is no unique definition of texture. There is no unique mathematical
model to synthesise texture; there are many ways to describe and extract it. It is a very large
and exciting field of research and there continue to be many new developments.
Clearly, images will usually contain samples of more than one texture. Accordingly, we
would like to be able to
describe
texture (
texture descriptions
are measurements which
characterise a texture) and then to
classify
it (classification is attributing the correct class
label to a set of measurements) and then perhaps to segment an image according to its
texture content. We have used similar classification approaches to characterise the shape
descriptions in the previous chapter. Actually these are massive fields of research that
move on to the broad subject of pattern recognition. We shall look at an introduction here,
later references will point you to topics of particular interest and to some of the more recent
developments. The main purpose of this introduction is to show how the measurements can
be collected together to recognise objects. Texture is used as the vehicle for this since it is
a region-based property that has not as yet been covered. Since texture itself is an enormous
subject, you will find plenty of references to established approaches and to surveys of the
field. First, we shall look at approaches to deriving the features (measurements) which can
be used to describe textures. Broadly, these can be split into
structural
(transform-based),