Image Processing Reference
In-Depth Information
evaluation of all R-table points for the particular row indexed by the gradient magnitude
are used to increment cells in the accumulator array. The maximum number of votes occurs
at the location of the original reference point. After all edge points have been inspected, the
location of the shape is given by the maximum of an accumulator array.
Note that if we want to try other values for rotation and scale, then it is necessary to
compute a table γ
(λ
, ρ
) for all potential values. However, this can be avoided by considering
that γ (λ
, ρ
) can be computed from γ (1, 0). That is, if we want to accumulate evidence for
), then we use the entry indexed by
ˆ
γ (λ
, ρ
i
+ and we rotate and scale the vector γ (1, 0).
That is,
γ
x
(λ
, ρ
) = λ
(γ
x
(1, 0) cos(ρ
) - γ
y
(1, 0) sin(ρ
))
(5.85)
γ
y
(λ , ρ ) = λ (γ
x
(1, 0) sin (ρ ) + γ
y
(1, 0) cos ( ρ ))
In the case of the polar form, the angle and magnitude need to be defined according to
Equation 5.82.
The application of the GHT to detect an arbitrary shape with unknown translation is
illustrated in Figure
5.22
. We constructed an R-table from the template shown in Figure
5.2
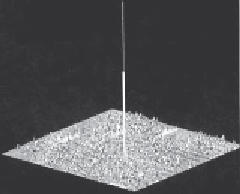
(a). The table contains 30 rows. The accumulator in Figure
5.22
(c) was obtained by
applying the GHT to the image in Figure
5.22
(b). Since the table was obtained from a
shape with the same scale and rotation as the primitive in the image, then the GHT
produces an accumulator with a clear peak at the centre of mass of the shape.
(a) Model
(b) Image
(c) Accumulator space
Figure 5.22
Example of the GHT
Although the example in Figure
5.22
shows that the GHT is an effective method for
shape extraction, there are several inherent difficulties in its formulation (Grimson, 1990),
(Aguado, 2000). The most evident problem is that the table does not provide an accurate
representation when objects are scaled and translated. This is because the table implicitly
assumes that the curve is represented in discrete form. Thus, the GHT maps a discrete form
into a discrete parameter space. Additionally, the transformation of scale and rotation can
induce other discretisation errors. This is because when discrete images are mapped to be
larger, or when they are rotated, loci which are unbroken sets of points rarely map to
unbroken sets in the new image. Another important problem is the excessive computation
required by the four-dimensional parameter space. This makes the technique impractical.
Also, the GHT is clearly dependent on the accuracy of directional information. By these