Image Processing Reference
In-Depth Information
between points separated by one pixel, with error
O
(∆
x
2
). If ∆
x
< 1 then this error is clearly
smaller than the error associated with differencing adjacent pixels, in Equation 4.6. Again,
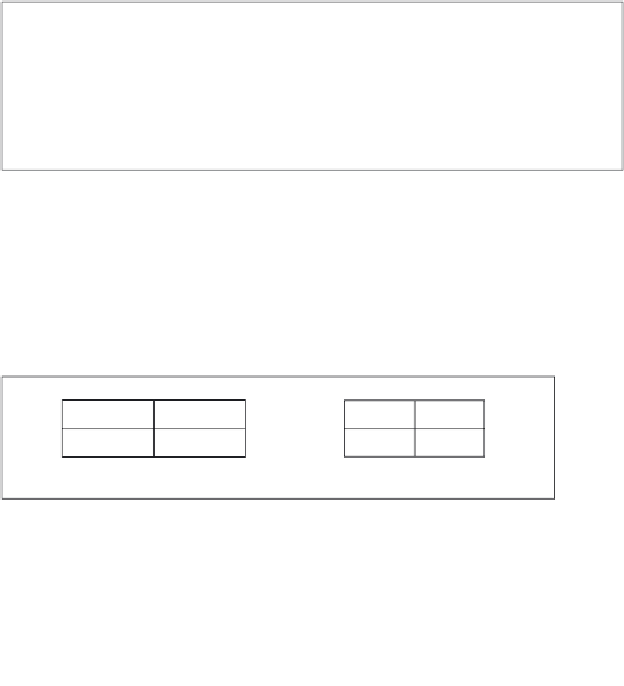
averaging has reduced noise, or error. The template for a horizontal edge detection operator
is given in Figure
4.4
(a). This template gives the vertical edges detected at its centre pixel.
A transposed version of the template gives a vertical edge detection operator, Figure
4.4
(b).
1
1
0
-1
0
-1
(a) Mx
(b) My
Figure 4.4
Templates for improved first-order difference
The
Roberts cross operator
(Roberts, 1965) was one of the earliest edge detection
operators. It implements a version of basic first-order edge detection and uses two templates
which difference pixel values in a diagonal manner, as opposed to along the axes' directions.
The two templates are called
M
+
and
M
-
and are given in Figure
4.5
.
0
+1
+1
0
-1
0
-1
0
(a) M
-
(b) M
+
Figure 4.5
Templates for Roberts cross operator
In implementation, the maximum value delivered by application of these templates is
stored as the value of the edge at that point. The edge point
E
x
,
y
is then the maximum of
the two values derived by convolving the two templates at an image point
P
x
,
y
:
E
x
,
y
= max {|
M
+
∗
P
x
,
y
|, |
M
-
∗
P
x
,
y
|}
∀
x
,
y
∈ 1,
N
- 1 (4.11)
The application of the Roberts cross operator to the image of the square is shown in
Figure
4.6
. The two templates provide the results in Figures
4.6
(a) and (b) and the result
delivered by the Roberts operator is shown in Figure
4.6
(c). Note that the corners of the
square now appear in the edge image, by virtue of the diagonal differencing action, whereas
they were less apparent in Figure
4.2
(d) (where the top left corner did not appear).
An alternative to taking the maximum is to simply
add
the results of the two templates
together to combine horizontal and vertical edges. There are of course more varieties of
edges and it is often better to consider the two templates as providing components of an
edge vector
: the strength of the edge along the horizontal and vertical axes. These give
components of a vector and can be added in a vectorial manner (which is perhaps more
usual for the Roberts operator). The
edge magnitude
is the
length
of the vector, the
edge
direction
is the vector's
orientation
, as shown in Figure
4.7
.