Image Processing Reference
In-Depth Information
Mean = 114 σ = 2
Mean = 147 σ = 4
Mean = 154 σ = 2
Mean = 158 σ = 2
130
200
180
170
120
150
160
160
110
100
140
150
0
200
400
0
200
400
0
200
400
0
200
400
Mean = 199 σ = 1
Mean = 205 σ = 2
Mean = 175 σ = 36
Mean = 248 σ = 41
210
500
400
205
200
205
200
0
195
200
0
0
200
400
0
200
400
0
200
400
0
200
400
Mean = 304 σ = 8
Mean = 309 σ = 9
Mean = 601 σ = 174
Mean = 677 σ = 4
350
350
1000
700
300
500
680
300
250
250
0
660
0
200
400
0
200
400
0
200
400
0
200
400
Mean = 681 σ = 4
690
680
670
0
200
400
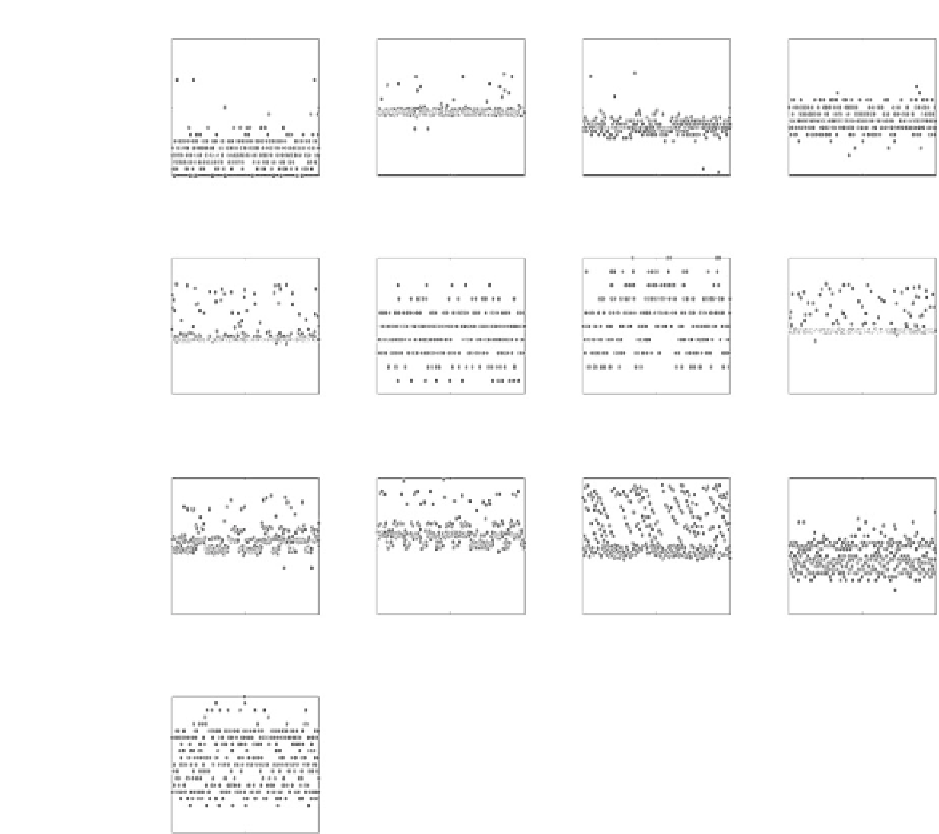
FIGURE .
Device delays for DeviceNet devices in a request-response setup as described in Section ....
Delaysaremeasuredwithonlysourceanddestinationnodecommunicatingonthenetworkandthusfocusonlyon
device delay jitter as described in Section ... ...The stratification of delay times seen in some nodes is due to the fact
that the smallest time that can be recorded is µs.
sample new information at the same time. In a “poll” connection, the master sends individual
messages to the polled devices and requests update information from them. Devices only respond
with new signals after they have received a poll message. “COS/cyclic” devices send out messages
either when their status is changed (COS) or periodically (cyclic). Although the COS/cyclic connec-
tion seems most appropriate from a traditional control systems point of view, strobe and poll are
commonly used in industrial control networks [].
For example, consider the strobe message connection in Figure .. If Slave is sending a mes-
sage, the other eight devices must wait until the network medium is free. In a CAN-based DeviceNet
network, it can be expected that Slave will encounter the most waiting time because it has a lower
priority on this priority-based network. However, in any network, there will be a nontrivial waiting
time after a strobe, depending on the number of devices that will respond to the strobe.