Image Processing Reference
In-Depth Information
Function block
Index
Slot 1
Parameter
Slot 2
1
Param1
Param2
2
Slot index
Param index
Address
Data item
Module1
D
I
Module2
Virtual devices
Module3
Device memory
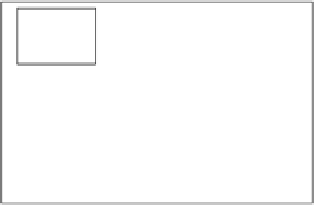
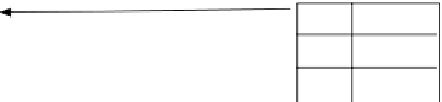
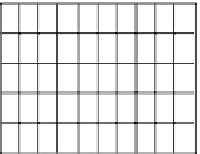
FIGURE .
Mapping of function blocks to physical device in PROFIBUS DP. (From Pitzek, S. and Elmenreich,
W., Configuration and management of fieldbus systems. In R. Zurawski, ed.,
he Industrial Communication Technology
Handbook
. CRC Press, Boca Raton, . With permission.)
•
Use of state communication as primary communication mechanism for operating a
fieldbus []. State communication usually involves cyclically updating the associated
application data.
•
Support for asynchronous/sporadic communication (event communication) in order to
perform management functions and deal with parts of the application that cannot be
performed with state communication.
A common method to achieve these properties is scheduling. here are many scheduling approaches
with vastly different effects on configuration. Following are some commonly used approaches
adopted in fieldbus systems:
Multi-cycle polling
: In this approach, communication is controlled by a dedicated node that autho-
rizes other nodes to transmit their data []. [].This dedicated node, typically called master node, which
polls the other nodes in a time division multiplexing scheme is used for bus access. his approach is
taken, for example, in WorldFIP, FF, and ControlNet. For configuring the devices in such a network,
themasternodesrequireatleastalistofnodestobepolled,i.e.,incaseofaconigurationwitha
single master only one node must be configured with the time information in order to control the
whole cluster.
Time-triggered
: In a time-triggered communication model, the communication schedule is derived
from the progression of physical time. This approach requires a predefined collision-free schedule
that defines
apriori
when a device is allowed to broadcast its data and an agreement on a global
time, which requires the synchronization of the local clocks of all participating devices []. Examples
for protocols that support time-triggered communication are TTP/A [], TTP/C [], and the syn-
chronous part of the Flexray protocol []. In order to configure the communication in these systems
the schedules must be downloaded to all the nodes in the network.
Event-triggered
: Event-triggered communication implements a push model, where the sender
decides when to send a message, e.g., when a particular value has changed more than a given
delta
.
Collisions on the bus are solved by collision detection/retransmission or collision avoidance, i.e., bit-
wise arbitration protocols such as CAN []. Event-triggered communication does not depend on
scheduling, since communication conflicts are either resolved by the protocol at the data link layer
(e.g., bitwise arbitration) or must be resolved by the application.