Image Processing Reference
In-Depth Information
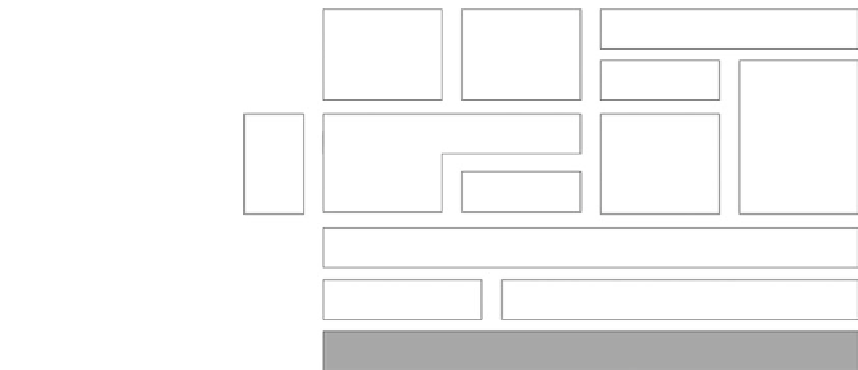
ComM
Com
Dcm
Nm
PduR
xxSm
IpduM
xxNm
xxTp
xxlf
xxTrcv
xx
Hardware
FIGURE .
AUTOSAR—communication substack.
18.7.2.1 Communication Substack
The communication substack contains a group of modules that facilitate communication among the
different ECUs in a vehicle via automotive communication protocols (CAN, LIN, and FlexRay). he
structure of the communication substack is depicted in Figure ..
Hereby
xx
is used as a placeholder for the respective communication protocol (i.e., CAN, LIN,
FlexRay). hus the AUTOSAR communication substack contains communication protocol specific
instances of the Transport Protocol (
Tp
), Network Management (
Nm
), Interface (
If
), State Manager
(
Sm
), Transceiver Driver (
Trcv
), and Driver (no suffix) modules. In the following, the different
modules of the communication substack are described in detail.
Driver
(
xx
): he Driver module (
Fr
,
Can
,
Lin
) provides the basis for the respective Interface mod-
ule, by facilitating the “transmission and the reception of frames” via the respective CC. Hereby, the
Driver is designed to handle multiple CCs of the same type. hus, if an ECU contains, for example,
FlexRay CCs of two different types, two different FlexRay Driver modules are required.
Transceiver driver
(
xxTrcv
): The various different Transceiver Driver modules (
FrTrcv
,
CanTrcv
,
LinTrcv
) provide API functions for “controlling the transceiver hardware” (i.e., switch-
ing the transceivers into special modes [e.g., listen only mode]) and for obtaining diagnostic infor-
mation from the transceiver hardware (e.g., information about short circuits of the different bus-lines
of CAN or information about wake-up events on the bus).
Interface
(
xxIf
): Using the frame-based services provided by the Driver module, the Interface mod-
ule (
FrIf
,
CanIf
,
LinIf
) facilitates “the sending and the reception of protocol data units (PDUs).”
Hereby, multiple PDUs can be packed into one frame at the sending ECU and have to be extracted
again at the receiving ECU.
∗
The point in time when this packing and extracting of PDUs takes
place is governed by the temporal scheduling of so-called “communication jobs” of the FlexRay and
the LIN Interface. The instant when the frames containing the packed PDUs are handed over to
the Driver module for transmission or retrieved from the Driver module upon reception is trig-
gered by communication jobs of the Interface module as well. In FlexRay, the schedule of these
∗
Currently only the FlexRay Interface modules support the packing of multiple PDUs into one frame. For the CAN and
the LIN interface modules, there is a : relationship between PDUs and frames.