Image Processing Reference
In-Depth Information
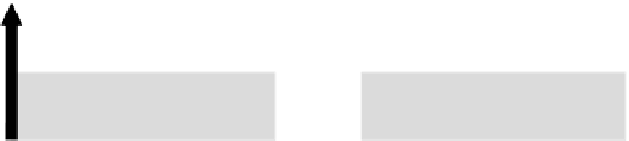
Cycle time
Synchronous
window length
SYNC
SYNC
TPDOs
(input data
from sensors)
RPDOs
(output commands
to actuators)
CANopen
devices
Other
PDOs
Application
master
Time
Sampling at SYNC
Actuation at the next SYNC
FIGURE .
Synchronous operation.
synchronousvalueshavebeenexchanged.Aterthistimehaselapsed,eachdevicecanstartprocessing
the input/output values.
Synchronous operations provide a noticeable improvement for lessening the effect of jitters: in this
case, in fact, system operations and timings are decoupled from the actual times PDOs are exchanged
over the network.
Three triggering modes are defined for PDOs in CANopen that specify conditions for sending a
particular PDO over the network (see Figure .):
•
Event- and timer-driven
:Inthiscase,thedecisiononwhenacertaindatashouldbesent
is completely up to the PDO producer; in particular, the transmission could be triggered
either by the occurrence of an application-specific event (depending on the particular
device profile or manufacturer) or by the expiration of a local timer because no event has
occurred (event time).
•
Remotely requested
: In this case, the transmission of data is triggered by the PDO
consumer(s) by means of suitable remote frames (i.e., the PDO is requested explicitly).
•
Synchronous
: In this case, a third entity in the network—other than the PDO producer
and its consumers—drives the exchange; in particular, the transmission is triggered by
the reception of the SYNC object.
Transmission and triggering modes for TPDOs are configured through the transmission type param-
eter, encoded as an bit unsigned integer. Values from to mean synchronous transmissions. In
particular, value means that the PDO has to be sent at every SYNC, whereas values
n
in the range
-meanthatitissentevery
n
th SYNC (cyclic transmission). Value , instead, is used when
generation is acyclic but transmissions have to take place at the SYNC.
Values and denote RTR-only triggering schemes. In particular, value means syn-
chronous RTR-only, that is, data is sampled at the SYNC, temporarily buffered and then sent when
the related remote frame is received. Value , instead, means asynchronous RTR-only, i.e., both
sampling and transmission take place at the remote frame reception.
Finally, values and concern the event-driven triggering schemes. In these cases, triggering
is a pure local issue (manufacturer-specific in the former case or device-profile-specific in the latter).
Similar consideration apply to RPDOs, where it is possible to choose between asynchronous
and synchronous triggering only. In the asynchronous version the received data is passed to the
application (e.g., actuated) as soon as it is received from the network, whereas in the synchronous
variant the value is first buffered and then (actually) used at the next SYNC.