Image Processing Reference
In-Depth Information
BC0
Ref. msg
Msg. A
Msg. E
Arb.
Free
Msg. C
Msg. D
BC1
Ref. msg
Msg. A
Msg. R
Msg. M
Msg. R
Msg. C
Msg. M
BC2
Ref. msg
Msg. A
Arb. (merged window)
Msg. T
Msg. C
Msg. D
BC3
Ref. msg
Msg. A
Msg. U
Msg. M
Free
Msg. C
Msg. M
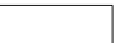
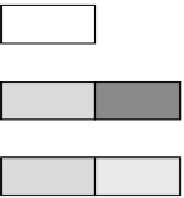
FIGURE .
System matrix in TTCAN.
For increased flexibility, it is possible to have more than one BC. A system matrix can be defined,
which consists of up to different BCs (the exact number has to be a power of two), which are
repeated periodically (see Figure .). .).Thus, the actual periodicity in TTCAN is given by the so called
matrix cycle. A cycle counter—included in the first byte of RM—is used by every node to determine
the current BC. The TM increases the cycle count by one in every cycle, until the maximum value
(which is selected on a network-wide basis before operation is started) is reached and the counter is
restarted.
It should be noted that the system matrix is highly column-oriented. In particular, each BC is
made up of the same sequence of time windows, i.e., corresponding windows in different BCs do
have exactly the same duration. However, they can be used to convey different messages, depending
on the cycle counter. In this way, it is possible to have messages in exclusive windows that are repeated
once every any given number of BCs. Each one of such messages is assigned a repeat factor and a cycle
offset to characterize its transmission schedule. he repeat factor specifies how often a given message
has to be sent, whereas the cycle offset is a displacement to avoid collisions among different messages
that share the same time window. Both of these parameters are expressed as an integral number of
BCs. his “multiplexing” mechanism enables the optimization of the bus allocation with respect to
the timing requirements of the diferent messages, hence achieving noticeable savings for the network
bandwidth.
Similarly, more than one exclusive window can be allocated to the same message in the same BC.
This is useful either to have redundant transmission of critical data or for refreshing some variables
with a rate faster than the BC.
15.5.3 Implementation
Each TTCAN controller has its own clock and is provided with a local time that is basically a counter
which is increased by one every network time unit (NTU). The NTU must be the same (at least,
nominally) on the whole network. Each node derives it from the local clock and a local parameter
known as time unit ratio (TUR). The biggest difference between the level and level variants of
theprotocolisthatthelatterdeinesanadaptivemechanismthat,byconstantlyupdatingtheTUR
parameters of the different nodes, is able to keep the NTUs (and, hence, the global time) accurately
synchronized.
Whenever receiving RM, each node restarts its cycle timer, so that a common view of the elapsing
time is ensured across the whole network. In practice, every time the SOF bit of a new CAN message