Image Processing Reference
In-Depth Information
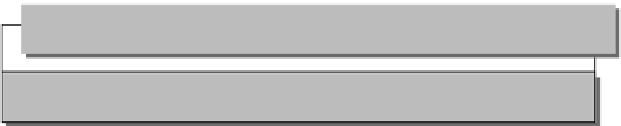
Application programs
and devices
Device profiles
CAN-based application layer (CANopen, DeviceNet, SAE J1939)
Application layer (CANopen, DeviceNet, SDS, SAE J1939)
CAN Data-link layer
(CAN controller)
LLC
MAC
CAN Physical layer (CAN transceivers and connectors)
CAN bus
FIGURE .
CAN protocol stack.
The data-link layer, instead, is split into two separate sublayers, namely the medium access control
(MAC)andthelogicallinkcontrol(LLC).hepurposeoftheMACentityisbasicallytomanage
the access to the shared transmission support by providing a mechanism aimed at coordinating
theuseofthebus,soastoavoidunmanageablecollisions.hefunctionsoftheMACsublayerinclude
frame encoding and decoding, arbitration, error checking and signaling, and also fault confinement.
The LLC sublayer, instead, offers the user (i.e., application programs running in the upper layers) a
proper interface, which is characterized by a well-defined set of communication services, in addition
to the ability to decide whether or not an incoming message is relevant to the node.
It is worth noting that the CAN specification is very flexible concerning both the implementation
oftheLLCservicesandthechoiceofthephysicalsupport,whereasmodiicationstothebehaviorof
the MAC sublayer are not admissible.
As mentioned before, unlike most fieldbus networks the CAN specification does not include any
native application layer. However, a number of such protocols exist that rely on CAN and ease the
design and the implementation of complex CAN systems.
15.2.1 Physical Layer
The features of the physical layer of CAN that are valid for any system, such as those related to the
physical signaling, are described in the ISO - document [ISO]. Instead, medium access units
(i.e., transceivers) are defined in separate documents, e.g., ISO - [ISO] and ISO - [ISO]
for high- and low-speed communications, respectively. he definition of the medium interface (i.e.,
connectors) is usually covered in other documents.
15.2.1.1 Network Topology
CAN networks are based on a shared bus topology. Buses have to be terminated with resistors at
each end (the recommended nominal impedance is Ω), so as to suppress signal reflections. For
thesamereasonstandarddocumentsstatethatthetopologyofaCANnetworkshouldbeascloseas