Image Processing Reference
In-Depth Information
m
=10
m
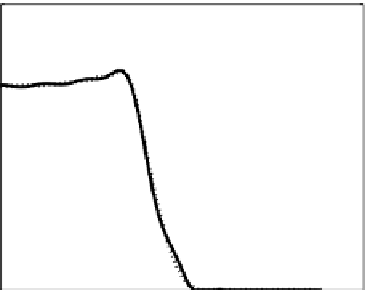
=4
1.4
1.4
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
0
0.5
1
1.5
2
2.5
3
3.5
0
0.5
1
1.5
2
2.5
3
3.5
(c)
(d)
Radian frequency (ω)
Radian frequency (ω)
m
=20
m
= 100
1.4
1.4
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
0
0.5
1
1.5
2
2.5
3
3.5
0
0.5
1
1.5
2
2.5
3
3.5
(e)
Radian frequency (ω)
(f )
Radian frequency (ω)
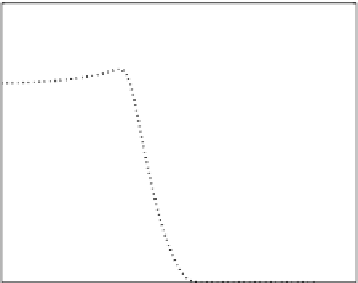
FIGURE . (continued)
9.6 Conclusion
We introduced a general paradigm for formulating and solving distributed signal-processing prob-
lems in sensor network. he core of this paradigm is formulating the problem as a convex feasibility
problem. The raw data collected by sensor nodes are processed locally to specify a convex feasible
set to which the global solution must belong. Each sensor node in the network specifies its own fea-
sible set and may update this set as it collects new data over time. Information fusion is interpreted
as finding a unique and stable global solution in the intersection of the feasibility sets specified by
all nodes. The global solution, if it exists, can be found using a plurality of distributed projection
algorithms. We discussed two projection algorithms in detail based on the simple RING and STAR
network topologies (Figure .).
However,thesearenottheonlypossiblewaysthatprojectionalgorithmscanbeusedforsolving
a convex feasibility problem in a distributed system. It is possible to design many other distributed
projection algorithms based on more elaborate network topologies such as those shown in Figure ..
Analysis and design of distributed information fusion algorithms for various network topologies are
an open field of research. We hope that the initial results presented in our contribution point out the
way toward more complete theories and help give shape to the emerging field of sensor processing
forsensornetworks.