Image Processing Reference
In-Depth Information
Example .
Consider a simple -sensor network similar to the one shown in Figure .. Assume that the down-
sampling ratio in each Mote is equal to . Thus, N
=
N
=
N
=
N
=
.Assume,further,thatthe
transfer functions H
(
z
)
to H
(
z
)
which relate the Motes' front-end output v
i
(
n
)
to the original source
signal x
(
n
)
are given as follows:
.
z
−
.
z
−
.
z
−
.
z
−
.
+
+
+
+
(
z
)=
H
.
z
−
.
z
−
.
z
−
.
z
−
.
−
+
−
+
.
z
−
.
z
−
.
z
−
.
z
−
.
−
−
+
−
H
(
z
)=
.
−
.
z
−
+
.
z
−
−
.
z
−
+
.
z
−
.
z
−
.
z
−
.
z
−
.
z
−
.
−
+
−
−
H
(
z
)=
.
−
.
z
−
+
.
z
−
−
.
z
−
+
.
z
−
.
z
−
.
z
−
.
z
−
.
z
−
.
−
+
−
−
H
(
z
)=
.
+
.
z
−
+
.
z
−
+
.
z
−
−
.
z
−
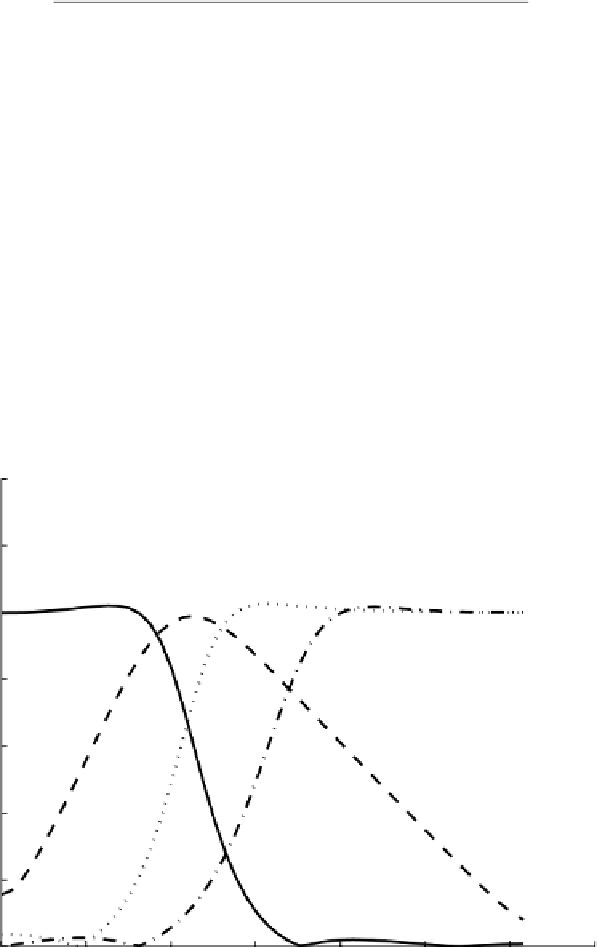
The above transfer functions were chosen to show typical low-pass, band-pass, and high-pass charac-
teristics
(
Figure .
)
. .).They were obtained using standard filter design techniques. he input signal whose
power spectrum is to be estimated was chosen to have a smooth low-pass spectrum . We used the Ring
Algorithm with L
and the Euclidean metric D
as the distance function to estimate the input sig-
nal's spectrum. he results are shown in (Figure .). As seen in this figure, the algorithm converges to a
solution which is in this case almost identical to the actual input spectrum in less than rounds.
=
♢
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
3.5
Radian frequency (ω)
FIGURE .
Frequency response amplitude of the transfer functions used in Example .. The curves show, from
e
j
ω
e
j
ω
e
j
ω
e
j
ω
left to right,
∣
H
(
)∣
,
∣
H
(
)∣
,
∣
H
(
)∣
,and
∣
H
(
)∣
.