Image Processing Reference
In-Depth Information
Relay
region
Relay region boundary
1
k
2
k
Relay node
r
Transmit node
i
i
Relay region asymptote
k
3
(a)
(b)
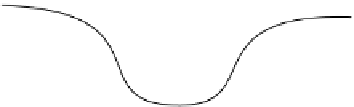
FIGURE .
MECN regions. (a) Relay region of a transmit-relay node pair. (b) Representation of an enclosure.
(Redrawn from Shahani, A.R., Schaeffer, D.K., and Lee, T.H., A mW wide dynamic range CMOS front-end for a
portable GPS receiver, in
Proceedings of IEEE International Solid-State Circuits Conference
,vol.,pp.-,Feb.
.)
consumption for data forwarding by finding the minimum-power topology to route packets with.
In MECN the authors observe that with the most common channel model used for RF systems
[Rap], the received power is proportional to
d
n
,where
d
is the distance and
n
is the path loss
/
exponent (with
n
for outdoor propagation models). Using this model, the transmission power
required is not proportional to the covering range, so relaying data between nodes can be more
energy-efficient than direct transmission. But considering the sensor field as a two-dimensional
plane, it is possible to calculate whether direct transmission is more or less expensive than relay-
ing as a function of the receiver's position. Thus for each transmitter-relay node pair (
i
,
r
), a relay
region can be defined as the region where forwarding through node
r
requires less energy than using
direct transmission. A sample relay region is depicted in Figure .a. For each node
i
,theenclosureis
defined as the union of the relay regions (
i
,
n
), with
n
≥
i
(depicted in Figure .b). his is the region
around
i
beyond which it is not energy-efficient to perform forwarding, so it is not useful to take
nodes into consideration for routing or to search for more neighbors. he main idea of this protocol
isthat,inordertoindtheminimum-energypathfromanodetothesink,averylocalizedsearch
can be performed that only considers nodes inside the enclosure.
The protocol is divided into two parts: a local search that finds the enclosure graph and minimum
path construction. During the first phase, each node broadcasts a beacon containing its position and
listens to beacons from neighbors. When it receives these messages, it computes the relay regions and
only maintains nodes which do not lie in the relay regions of other neighbors. In this way the enclo-
sure graph, which is the graph of communication links between all the nodes, is built. The second
phaseconsistsofindingoptimallinksintheenclosuregraph.healgorithmadoptedhereisthe
distributed Bellman-Ford shortest path [Bel] [For], where power consumption is used as a cost
metric.
Besides providing location information, GPS can also be used for synchronization purposes, so
that nodes can synchronize their sleep and wake-up intervals. After a wake-up, a local search and
minimumpathconstructionhavetoberuninordertoupdateoptimallinks.Hencetheprotocol
is self-configuring and fault-tolerant, but requires a noticeable overhead. he protocol was extended
≠