Image Processing Reference
In-Depth Information
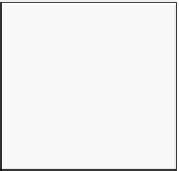
Comparison finite sensor networks (3
q
´
3
q
) with different degree of weights
0
(CL)
w
=1/
d
Critical area
1
w
=1/
d
Divergent error behavior
2
w
=1/
d
1.4
3
w
=1/
d
4
w
=1/
d
5
Aadaptive WCL
w
=1/
d
1.2
1.0
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2.0
2.5
3
3.5
4
r
min
= 0.71
q
r
opt,1
= 0.95
q
using
r
q
Relative transmission range
w
=1/
d
FIGURE .
Localization error using different degrees. (From Blumenthal, J., Grosmann, R., Golatowski, F., and
Timmermann, D.,
st European ZigBee Developer's Conference
(
EuZDC
), Munich, Germany, June . With permis-
sion; Blumenthal, J.,
IEEE International Symposium on Intelligent Signal Processing, WISP
,Madrid,Spain,October
. With permission.)
6.3.5.4 Range-Free Localization
The range-free localization algorithm is also known as “approximate point in triangulation” (APIT)
and bases on triangular surfaces. he algorithm was first published in [HHB
+
]. He et al. reduce the
influence of absolute distance measurements, due to the high error that can be expected.
Likewise in CL, every beacon transmits its position in the sensor field. By permuting all beacon
positions
b
!
, every sensor node determines all resulting triangles. Then, each trian-
gle is checked by the “point in triangulation” (PIT) test. This check allows to make a decision if
the sensor node is placed on the triangle surface or not. After this test is finished, sensor nodes
know all triangles on which they are placed. All beacons constructing these triangles are used to
estimate the sensor nodes position by a centroid calculation with their positions. This is shown in
Figure .a.
The centerpiece of APIT is the PIT test. heoretically, a sensor node is outside a triangle of three
beacon positions if the following assumption is true: A mobile sensor node is slightly shifted in any
direction ∆
d
,thenallthreedistancestothesethreebeaconsmustincreaseordecreasesimultaneously.
Otherwise,thenodemustbeinsideatriangular(Figure.b).
He et al. take advantage of a large node density in sensor networks. Figure .c exemplary illus-
trates that a sensor node may have connection to four very close neighbors. hese neighbors measure
theRSSItoallthreerequiredbeaconsandsendthisinformationtothesensornodeundertest.his
/
!
⋅(
b
−
!
)