Image Processing Reference
In-Depth Information
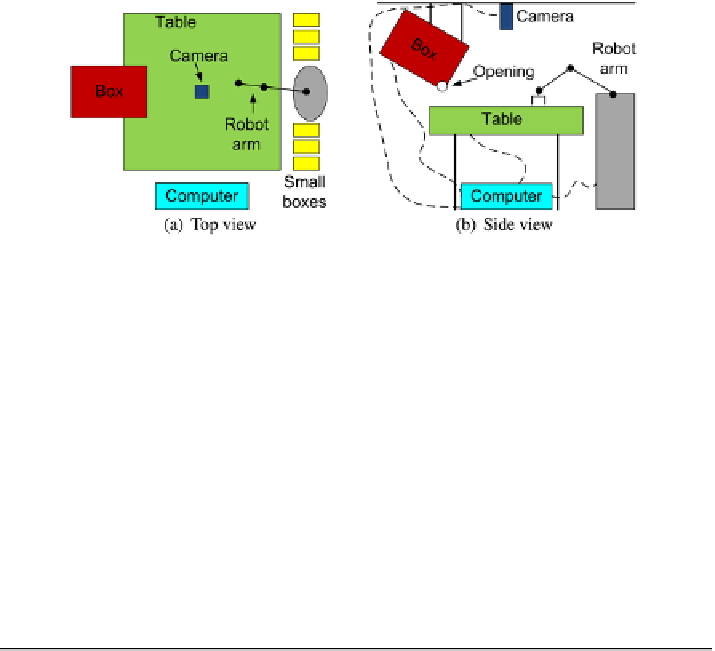
Fig. 13.1
An illustration of the concept. The
dashed lines
indicate that the computer can control
the table, the box, the robot, and receive data from the camera. Note that the small boxes are not
shown in the side view to simplify the visualization
“Well that's the thing, I need a way of informing the robot exactly where the
coins are located and their type.”
“Ahh, you need to do image processing, good, very good my young apprentice,”
Mick said smiling.
“True, but I don't know anything about it, so I though you might help me. My
uncle suggested asking you since you did such a good job some years back with
that math game. And he even said he would give you a discount on your bills if you
helped.”
The week after they all met at Fred's house to see the robot and know a bit more
about the coins and concept.
13.1 The Concept
Mick and SB were very impressed by the setup in Fred's basement. They had ob-
viously seen robots before on TV, but never met one in person, so to speak. While
Fred showed them around he explained the concept of his automatic coin sorting
system. Mick made two drawings so he would be able to remember when they got
back home, see Fig.
13.1
.
The concept was the following. The robot, or rather the robot arm, was equipped
with a “hand” allowing it to pick up objects located on the table in front of it. It
was no ordinary table, but a so-called vibrating table that was controlled from the
computer. At first Mick and SB were puzzled by the purpose of a vibrating table,
but later they realized that it played a central role in the setup.
“Look at that box up there”, said Fred. “That is where I place the coins. The
computer can then control the small opening in the bottom of the box and thereby
release coins onto the table. The box can hold around 2000 coins at a time and with
my 50,000 coins I just need to fill it up 25 times. When the coins are dropped onto
the table they often end on top of each other. This is problematic when the robot
tries to pick them up because it assumes the coins are located exactly on the table
and not some mm above. The computer therefore commands the table to vibrate,
which ensured the coins don't overlap.”