Image Processing Reference
In-Depth Information
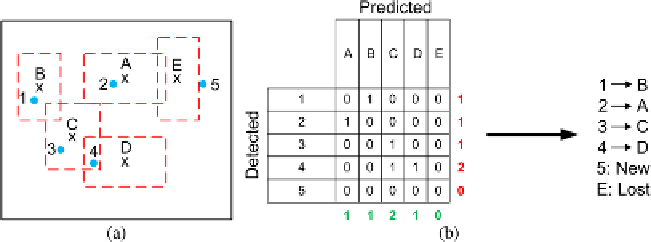
Fig. 9.8
(
a
)The
blue dots
are the detected objects and X illustrates the predicted objects. The
dashed red boxes
indicate the predicted ROIs. (
b
) A table indicating which detected objects that
match which predicted objects
low since this will in general increase the number of ambiguities. A better approach
is to delay the decision about whether an object is new or lost for some time.
If a lost object is present in an image, the trajectory is updated with the predicted
value instead of the missing detection. The more times this is done, the more un-
certain this trajectory becomes and hence the size of the ROI should be increased
accordingly. Moreover, if no detections have been associated to a trajectory for some
time, it should be concluded that the object is lost and its trajectory terminated.
For a new object to be accepted as a truly new object the following can be done.
The first time a new object is detected a temporary trajectory is defined and the
object is being tracked. When it has been successfully tracked for a certain amount
of time it can be concluded that this is indeed a new object and the trajectory is no
longer temporary. If no detected object is associated to the temporary trajectory for
some time, the temporary trajectory is terminated.
9.3.1 Good Features to Track
Instead of only focusing on the position when tracking objects we can also include
the features we are using to classify the different objects. This basically means we
are combining the matching problem describe above with the feature classification
problem discussed in Chap. 7. In practice we base the matching on the approach
from Sect. 7.3 and simply add the x- and y-positions of the object as two additional
features. The binary table in Fig.
9.8
(b) is then replaced by a table where each entry
indicates the distance from a predicted object and to a detected object. The uncer-
tainties related to the predicted and detected objects could/should be incorporated as
weights as discussed in Sect. 7.4. To binarize this new table each entry is thresholded
and we can therefore apply the same matching mechanisms as described above.
When tracking objects we can of course use any of the features described in
Chap. 7. But when it comes to tracking multiple objects we usually require more
details features. Below we describe two approaches namely color-based and texture-
based.