Image Processing Reference
In-Depth Information
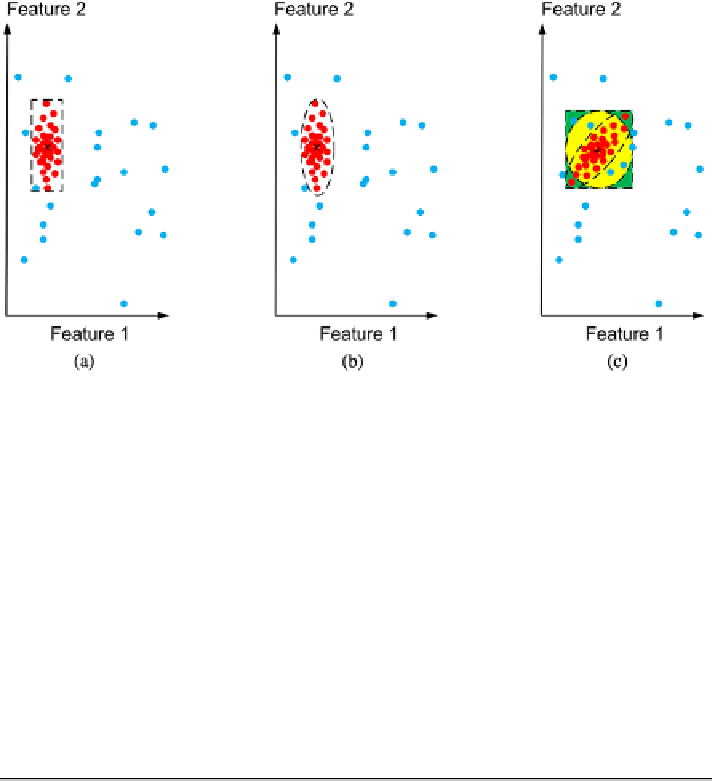
Fig. 7.9
A 2D feature space where each point is a feature vector, i.e., a BLOB. The
red points
are from the object we are trying to recognize while the
blue
are from non-object BLOBs. (
a
)Box
classifier. (
b
) Weighted Euclidean distance classifier. (
c
) Mahalanobis distance classifier (
rotated
ellipse
). Box classifier (
green rectangle
). Weighted Euclidean distance classifier (
yellow ellipse
)
regions for all three classifiers can be seen. Many other classifiers exist and are used
in fields such as computer vision, machine learning and artificial intelligence. Many
topics can therefore be found on this matter, see for example [8].
No matter what, before choosing a particular classifier always capture a lot of
training data and see how they spread out in the feature space. Just by looking at a
figure like Fig.
7.9
you can often get a very good impression of how to proceed with
the classification, but also, and equally important, an understanding of the quality of
the chosen features.
7.5
Exercises
Exercise 1:
Explain the following concepts: BLOB, connectivity, recursive grass-
fire algorithm, sequential grass-fire algorithm, feature space, classification.
Exercise 2:
How many BLOBs are present in Fig.
7.10
when 4-connectivity is ap-
plied?
Exercise 3:
How many BLOBs are present in Fig.
7.10
when 8-connectivity is ap-
plied?
Exercise 4:
In which order are the different pixels in Fig.
7.10
labeled when a re-
cursive grass-fire algorithm with 4-connectivity is applied?
Exercise 5:
Find the following features for each BLOB in Fig.
7.10
: area, bounding
box ration, compactness.
Exercise 6:
Find the center of mass and center of the bounding box for each BLOB
in Fig.
7.10
and discuss the differences.