Geoscience Reference
In-Depth Information
Z
T
Z
"
3
X
T
X
Y
"
2
x
0
Y
T
"
1
X
X
T
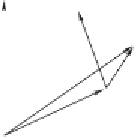
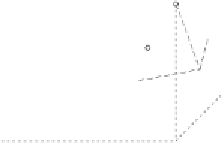
Fig. 5.7. Three-dimensional transformation
account for the coordinates of the origin of the
X
system in the
X
T
system.
Note that a single scale factor is considered. More generally (but with GPS
not necessary), three scale factors, one for each axis, could be used. The
rotation matrix is an orthogonal matrix which is composed of three successive
rotations
R
=
R
3
{
ε
3
}
R
2
{
ε
2
}
R
1
{
ε
1
}
.
(5-43)
Explicitly,
⎡
⎣
⎤
⎦
cos
ε
2
cos
ε
3
cos
ε
1
sin
ε
3
sin
ε
1
sin
ε
3
+sin
ε
1
sin
ε
2
cos
ε
3
−
cos
ε
1
sin
ε
2
cos
ε
3
R
=
−
cos
ε
2
sin
ε
3
cos
ε
1
cos
ε
3
sin
ε
1
cos
ε
3
−
sin
ε
1
sin
ε
2
sin
ε
3
+cos
ε
1
sin
ε
2
sin
ε
3
sin
ε
2
−
sin
ε
1
cos
ε
2
cos
ε
1
cos
ε
2
(5-44)
is obtained.
In the case of known transformation parameters
x
0
,µ,
R
,apointfrom
the
X
system can be transformed into the
X
T
system by (5-41).
If the transformation parameters are unknown, they can be determined
with the aid of common (identical) points, also denoted as control points.
This means that the coordinates of the same point are given in both systems.
Since each common point (given by
X
T
and
X
) yields three equations, two
common points and one additional common component (e.g., height) are
sucient to solve for the seven unknown parameters. In practice, redun-
dant common point information is used and the unknown parameters are
calculated by least-squares adjustment.
Since the parameters are mixed nonlinearly in Eq. (5-41), a linearization
must be performed, where approximate values
x
0approx
,
µ
approx
,
R
approx
are
required.