Geoscience Reference
In-Depth Information
k
l
j
k
l
%
A
(t
%
A
(t
m
m
%
A
(t
j
%
A
(t
Z
WGS-84
k
%
B
(t
l
%
B
(t
j
%
B
(t
m
%
B
(t
B
b
AB
A
Z
B
Z
A
Y
WGS-84
Y
B
X
B
X
A
X
WGS-84
Y
A
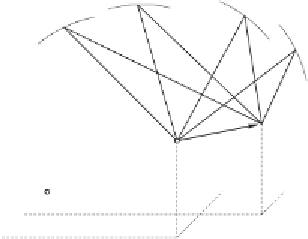
Fig. 5.3. Relative positioning
the relation
X
B
=
X
A
+
b
AB
(5-10)
may be formulated, and the components of the baseline vector
b
AB
are
⎡
⎤
⎡
⎤
X
B
−
X
A
Y
B
− Y
A
Z
B
−
∆
X
AB
∆
Y
AB
∆
Z
AB
⎣
⎦
=
⎣
⎦
.
b
AB
=
(5-11)
Z
A
The coordinates of the reference point must be given in the WGS 84 and are
usually approximated by a code pseudorange solution. Relative positioning
can be performed with code pseudoranges (cf. Eq. (5-3)) or with phase
pseudoranges (cf. Eq. (5-4)). Subsequently, only phase pseudoranges are
explicitly considered. We repeat (5-4),
λ
Φ=
+
cδ
+
λN,
(5-12)
where we have already explained the wavelength
λ
, the phase Φ, the distance
(which is the same as for the code pseudorange model), the speed of light
c
, the receiver clock error
δ
, and the ambiguity
N
in Sect. 5.3.3.
Introducing
f
, the frequency of the corresponding satellite signal, and
taking into account the relation
f
=
c/λ
, we may divide (5-12) by
λ
obtain-
ing
Φ=
1
λ
+
fδ
+
N.
(5-13)
This may be generalized to
Φ
i
(
t
)=
1
λ
i
(
t
)+
fδ
i
(
t
)+
N
i
,
(5-14)