Graphics Reference
In-Depth Information
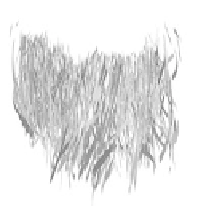
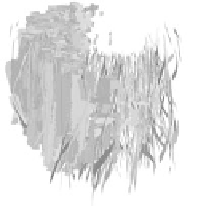
Figure 8.70
Hair “ribbons” in a 3D volume of detected hair fibers. The left image is from a single view-
point; the middle image is from two viewpoints; the right image comes from 24 viewpoints.
(From [Jakob et al. 09]
c
2009 ACM, Inc. Included here by permission.)
bor filters
) at various rotation angles and determines which most closely matches
the image around each pixel. If the match is close enough at a particular pixel,
it is likely that the pixel contains a hair fiber having the matching orientation.
The position of the match is recorded into a 3D volume representing a portion of
the hair fiber.
The ridge-detection algorithm provides a precise 2D position in the image.
The depth value however, which comes from the camera position of the particular
image, is much less certain. The images in part (b) of Figure 8.69 are formed
by sweeping the one-pixel slice of the captured images (indicated by the line in
part (a)) over all the camera positions. The individual hair fibers come into and
out of focus as the distance varies, but despite the very shallow depth of field,
each fiber appears in focus in several adjacent images. Consequently, the feature-
detection algorithm will find the fiber at several depth positions, and the detected
hair in the volume will appear as a 3D extrusion, i.e., is more like a “ribbon” than
a hair fiber. Figure 8.70 illustrates the resulting hair volume for a camera sweep
at one orientation.
The hair fibers could be reconstructed by chaining the centers of the ribbons in
the 3D volume, but the authors propose a more robust algorithm that leverages the
multiple viewpoint capture method. From different viewpoints, the same hair fiber
is matched to similar ribbons having different orientations. Figure 8.71 illustrates
the idea. The actual hair fiber is the intersection of the set of ribbons. There
is normally one ribbon for each rotation angle
, but occlusion of hair fibers in
the sample can cause the set of ribbons to be smaller. Having the redundancy of
many viewpoints makes the fitting process less sensitive to local occlusion. In
Figure 8.71 only three orientations (ribbons) are shown for clarity.
The 3D curve representing the hair fiber is constructed incrementally, using a
set of small line segments to approximate the curve. The authors call the method
θ