Graphics Reference
In-Depth Information
x
c
2
c
1
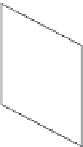
Figure 5.8
Stereo reconstruction is the problem of computing the 3D spatial coordinates of a point
x
that projects to points
x
1
and
x
2
in two separate images.
x
2
in two different images. Figure 5.8 illustrates; note the connection to epipolar
geometry.
Stereo reconstruction requires extrinsic camera parameters, i.e., the position
and orientation of the cameras when the images were captured. In Figure 5.8,
c
1
and
c
2
are the viewpoints of each camera. The position and orientation of the
image planes are expressed in terms of transformation matrices
P
1
and
P
2
,which
map the 2D image coordinates to 3D coordinates in the environment. The point
x
satisfies
x
=
c
1
+
t
1
P
1
x
1
=
c
2
+
t
2
P
2
x
2
,
(5.2)
where
t
1
and
t
2
are the unknown parameters. Equation (5.2) is actually a system
of three equations, one for each coordinate. This system is overdetermined, as it
has only two variables. Solutions
t
1
and
t
2
for any two of the equations would
ideally be the same; however, the system is likely to have no exact solution due to
uncertainties in the coordinates. That is, the lines cannot be expected to intersect
exactly. Values of
t
1
and
t
2
are chosen to minimize the overall error, usually in a
least squares sense.
In practice, stereo reconstruction is applied to a collection of points, such as
a set of feature points in a real scene. The goal is to reconstruct (or create) an
underlying model by estimating the vertex coordinates. This requires minimizing
the error in the estimation over all the points, which can be formulated as a large
least squares system. But depending on the assumptions of the particular problem,
it may not be a linear system, in which case nonlinear optimization techniques