Graphics Reference
In-Depth Information
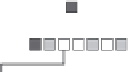
Root
Voxels that contain the rendering point
Voxels that can approximate the set of
sample points by themselves
Voxels that need to be subdivided due to
incapability of approximating their own sample points
Figure 4.14
Hierarchy of voxels used in the “fast translucency” algorithm. The root voxel contains
the entire object; the leaf voxels contain a single sample point. Parent voxels contain the
aggregate values of the child voxels.
Leaves
each “rendering” point at which the irradiance is needed. Some of these sam-
ples can be reused at nearby rendering points. The algorithm proposed in Jensen
and Buhler's fast translucency paper does this: it first performs uniform, dense
sampling over the surface, and then computes the irradiance at these points (see
Figure 4.13
)
. These precomputed irradiance values are reused during rendering.
As described in Section 4.3.3, sample points far away from an evaluation point
have exponentially decreasing influence on the value of the dipole-based diffuse
BSSRDF. Accordingly, the algorithm arranges the precomputed values in a hierar-
chy of increasingly small regions. The smallest regions contain the actual sample
points. Larger regions are built from the smaller regions; the value of a larger
region is the sum of the values in the smaller regions it contains. The hierarchy is
traversed at each evaluation point in a manner that uses the aggregate value in the
larger regions where the sample points are less significant.
The hierarchy is constructed from voxels. The voxel at the top level in the
hierarchy corresponds to the entire object. Each voxel stores its position (the
centroid of the voxel) and total irradiance (the sum of the sample values inside
the voxel). Figure 4.14 illustrates the voxel hierarchy as a simple tree structure,
although other data structures such as a
k
d-tree can also be used. The hierarchy
is traversed at each evaluation point in order to adaptively use the precomputed
sample points. How far away the voxel is from the evaluation point determines
the level of the voxel to be used: near the sample point the finest level is used;
further away, the summed value in a larger voxel suffices. Figure 4.15 illustrates
how the voxel in the hierarchy level is chosen. If all the sample points in a voxel
are inside a certain solid angle measured from the evaluation point, i.e., if
Δω