Information Technology Reference
In-Depth Information
w
w
w
y
w
z
z
x
x
x
=
y
x
Fig. 8.
Fig. 9.
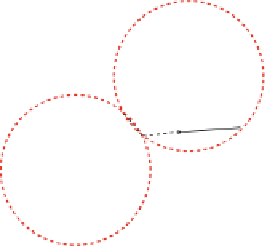
sub-paths. This motivates our next focus on the form of inflection-free discrete-
geodesics.
3 A Normal Form for Inflection-Free Geodesics
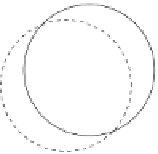
We have already noted that any short-
est dcc-path of minimum size consists
of a finite number of maximal dis-
crete circular arcs connected by (pos-
sibly degenerate) line segments that
we refer to as
bridges
. Here we include
the (possibly degenerate) circular arcs
(e.g. vertex
k
in Fig.
10
) supported
by the circles (shown as dashed) that
define the endpoint configurations of
the path. A bridge
vw
is
degenerate
if
v
=
w
(e.g. the first bridge, vertex
d
,
in Fig.
10
). Of course, if a given path
has no inflection edges, all of the dis-
crete circular arcs have the same ori-
entation; without loss of generality we will assume that they are all clockwise
oriented (see Fig.
10
).
The main result of this section is the following theorem. It amounts to a
special case of a general characterization theorem for discrete-geodesics and is a
fundamental building block for the proof of that theorem.
f
g
e
d
h
c
i
b
j
k
a
Fig. 10.
A discrete-curvature-constrained
path with five discrete arcs (including one
degenerate arc) and no inflections.
Theorem 2.
Any inflection-free discrete-geodesic, joining two specified end-
point configurations, is composed of a sequence of at most four discrete circular
arcs, at most two of which are non-degenerate, joined by (possibly degenerate)
bridges.






















Search WWH ::

Custom Search