Information Technology Reference
In-Depth Information
C
C
B
B1(a)
a
b
d
BB2(a)
BB2(a)
c
b
a
FB2(c
c
e
BB1(b)
BB2(e)
FF1(c)
BB2(d)
FF2(c)
BB2(b)
FF2(b)
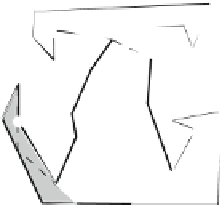
(a)
(b)
Fig. 3.
Two types of the polygons which are not link-2
LR
-visible.
Theorem 2.
A polygon
P
is link-2
LR
-visible if and only if there do not exist
k
non-redundant link-2 components (they may be the
ʱ
-or
ʲ
-components) such
that each of them exactly intersects with
k
other components, where
0
k
≤
≤
k
−
3
.
Proof.
The necessity directly follows from Lemmas
2
and
3
. Assume now that
there do not exist
k
non-redundant link-2 components in
P
such that each of
them exactly intersects with
k
other components, where 0
k
≤
3. As in the
proof of Theorem 1 of [
14
], we can classify all non-redundant link-2 components
(including both
ʱ
-components and
ʲ
-components) into two groups such that
the common intersection of the components in either group is not empty. Thus,
we can find two boundary points
s
and
t
, one per group, such that
P
is link-2
LR
-visible with respect to
s
and
t
(Lemma
1
).
≤
k
−
4 Recognizing Link-2
LR
-visibility Polygons
In this section, we present an
O
(
n
log
n
) time algorithm for determining whether
a given polygon
P
is link-2
LR
-visible as well as for reporting a pair or all
pairs (
s, t
) which admit link-2
LR
-visibility. A main procedure is to compute
a superset of all non-redundant backward link-2
ʱ
-components. A symmetric
procedure does the same for the forward link-2
ʱ
-components. As described in
[
3
], the non-redundant link-2
ʱ
-components can then be extracted from these two
sets. Analogously, we compute the non-redundant link-2
ʲ
-components. After all
non-redundant link-2 components are computed, we can determine whether
P
is link-2
LR
-visible (Theorem
2
).
By symmetry, we give below only the procedure for computing a superset of
non-redundant link-2 backward
ʱ
-components. We will make use of the shortest
path trees, rooted at some polygon vertices. The
shortest path
between two points
a
and
b
of
P
, denoted by
SP
(
a, b
), is the Euclidean minimum-distance curve with
the endpoints
a
and
b
inside
P
. The path
SP
(
a, b
) is always a polygonal chain,































































































































Search WWH ::

Custom Search