Hardware Reference
In-Depth Information
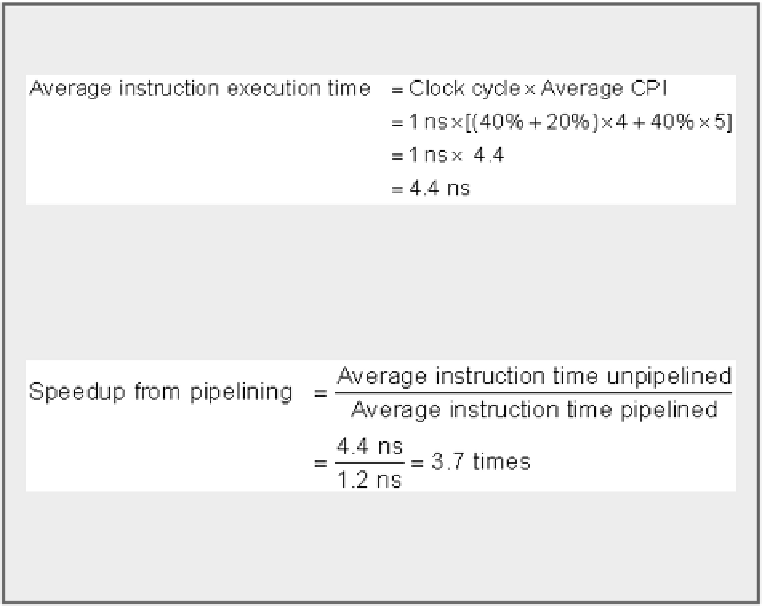
In the pipelined implementation, the clock must run at the speed of the slow-
est stage plus overhead, which will be 1 + 0.2 or 1.2 ns; this is the average in-
struction execution time. Thus, the speedup from pipelining is
The 0.2 ns overhead essentially establishes a limit on the effectiveness of
pipelining. If the overhead is not affected by changes in the clock cycle, Am-
dahl's law tells us that the overhead limits the speedup.
This simple RISC pipeline would function just fine for integer instructions if every instruc-
tion were independent of every other instruction in the pipeline. In reality, instructions in the
pipeline can depend on one another; this is the topic of the next section.
C.2 The Major Hurdle of Pipelining—Pipeline Hazards
There are situations, called
hazards
, that prevent the next instruction in the instruction stream
from executing during its designated clock cycle. Hazards reduce the performance from the
ideal speedup gained by pipelining. There are three classes of hazards:
1.
Structural hazards
arise from resource conflicts when the hardware cannot support all pos-
sible combinations of instructions simultaneously in overlapped execution.
2.
Data hazards
arise when an instruction depends on the results of a previous instruction in a
way that is exposed by the overlapping of instructions in the pipeline.
3.
Control hazards
arise from the pipelining of branches and other instructions that change the
PC.
Hazards in pipelines can make it necessary to
stall
the pipeline. Avoiding a hazard often re-
quires that some instructions in the pipeline be allowed to proceed while others are delayed.
For the pipelines we discuss in this appendix, when an instruction is stalled, all instructions
issued
later
than the stalled instruction—and hence not as far along in the pipeline—are also
stalled. Instructions issued
earlier
than the stalled instruction—and hence farther along in the
Search WWH ::

Custom Search