Environmental Engineering Reference
In-Depth Information
and for all ranges of component values. Unfortunately, this is not a realistic
case, since real amplifiers have more than one pole.
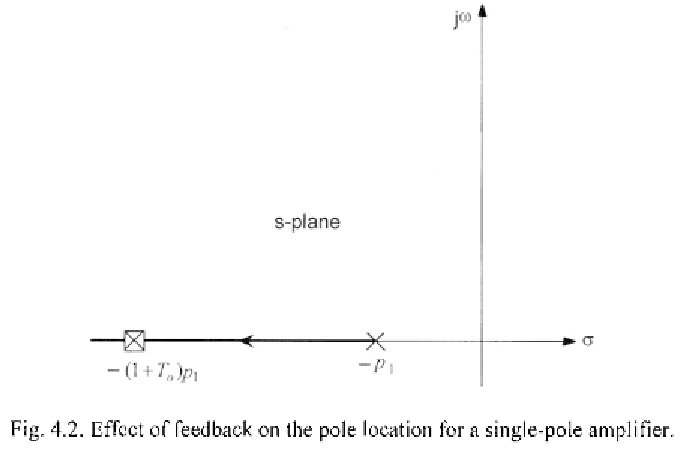
Returning to (4.3b), we see that the closed-loop pole has been shifted to a
higher frequency by a factor equal to (that is, approximately the DC
loop gain), which is the same amount of reduction experienced by the
closed-loop DC gain with respect to the open-loop gain. Thus, a gain
bandwidth trade-off exists between the open- and closed-loop transfer
functions, indicating that in a one-pole amplifier we can apply feedback to
obtain higher bandwidth where amplifier gain reduction is allowed. This
trade-off is represented by the
gain-bandwidth product,
which is the
3-dB angular frequency
Note also that the gain-bandwidth product of a single-pole function exactly
equals its
unity-gain frequency,
(i.e., the frequency at which the module
of the gain becomes unitary, for this reason it is also called the
transition
frequency). Moreover, is an invariant amplifier parameter, since its
value is the same for the open-loop and closed-loop amplifier, as illustrated
in Fig. 4.3, showing the open-loop, closed-loop and loop-gain transfer
functions. Of course, the gain-bandwidth product of
A
product of the DC open-loop gain,
and its
-
is independent of
the degree of feedback applied and is equal to the maximum bandwidth
achieved with the unitary feedback factor,
f
= 1 (i.e., with the amplifier in
unity gain feedback configuration). More interestingly, (4.3b) predicts that
the gain-bandwidth product of the loop-gain transfer function will equal the
closed-loop pole. Thus, when studying the stability of a feedback amplifier,
(
s
)