Environmental Engineering Reference
In-Depth Information
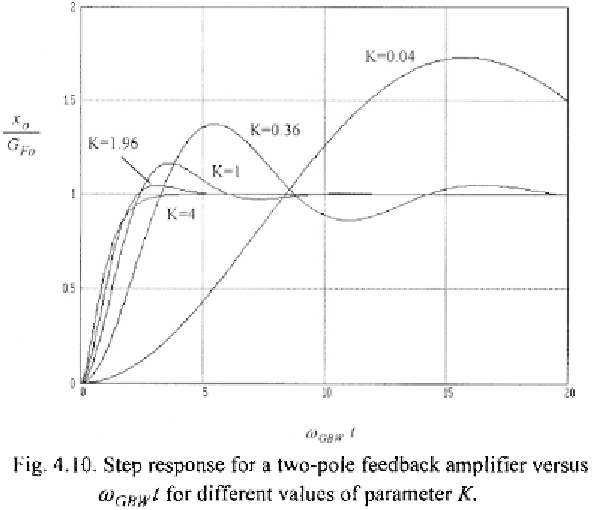
Like for the peaking amplitude in the frequency domain, the overshoot
amplitude in the time domain depends only on the value of
K.
Relationships
(4.23) and (4.24) are useful for optimising design in the time domain.
Equation (4.24) gives the value of
for a specified settling error, and from
(4.23) we determine the gain-bandwidth product needed by the settling time
required. For instance, obtaining a step response to within 1% means
K=
2.73. From (4.16) this value corresponds to a phase margin of about 70°.
Then, if 1% settling is to be achieved within a time period not greater than
100 ns, the required gain-bandwidth product is
It should now be pointed out that in real amplifiers the second pole is
generally fixed by design and topology constraints. Subsequently, the
requirement on parameter
K
(or equivalently on the phase margin) indicates
the gain-bandwidth we must provide to the loop-gain transfer function to
ensure an adequate stability margin. To this end, as shall be discussed in
detail in the next chapter, we have to properly reduce the dominant pole of
the open-loop amplifier. This mandatory operation drastically reduces the
high-frequency capability of the feedback amplifier, which, if operated in
open-loop conditions, is characterised by a high-sensitive gain, but has its
maximum bandwidth potential limited by the frequency of the second pole.
As a consequence, the bandwidth improvement caused by the feedback is
K