Graphics Reference
In-Depth Information
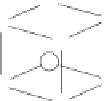
Fig. 10.5
(
a
) The original frame. (
b
) Rotated frame about the
x
-axis. (
c
) Rotated frame about the
y
-axis. (
d
) Rotated frame about the
z
-axis
Note that this specific transform also suffers from gimbal lock, where it is impos-
sible to rotate the cube through an axis passing through vertices 0 and 2. Whereas,
the cube is rotated twice about the axis passing through vertices 0 and 4. Effec-
tively, the axial system has been rotated 180° about the vector
T
, which could
[
101
]
be confirmed by calculating the eigenvalue and eigenvector.
10.5 Rotated and Translated Frames of Reference
One of the most important frame changing transforms in cgi enables us to view an
object from any location in space. The transform uses a rotation, which is often a
composite transform, for example
R
−
1
γ,z
R
−
1
α,x
, and a translation
T
−
1
β,y
R
−
1
t
x
,t
y
,t
z
. And as
the position of the translated frame is normally specified in the original frame, we
begin by translating the frame followed by the rotation:
⎡
⎣
⎤
⎦
⎡
⎣
⎤
⎦
c
γ
s
β
s
α
+
−
c
γ
s
β
c
α
+
−
c
γ
c
β
s
γ
c
α
s
γ
s
α
0
100
t
x
−
−
s
γ
s
β
s
α
+
s
γ
s
β
c
α
+
−
s
γ
c
β
c
γ
c
α
c
γ
s
α
0
010
t
y
.
(10.2)
s
β
−
c
β
s
α
c
β
c
α
0
001
t
z
000 1
−
0
0
0
1
It is not worth multiplying these matrices together as it creates too many terms.
However, we can test it with a simple example.