Graphics Reference
In-Depth Information
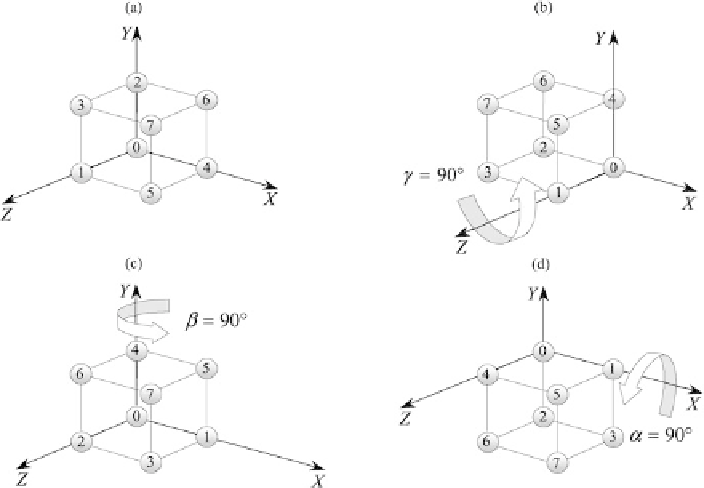
Fig. 9.5
Four views of the unit cube using the rotation sequence
R
α,x
R
β,y
R
γ,z
Multiplying the three matrices in (
9.4
) together we obtain
⎡
⎤
c
β
c
γ
−
c
β
s
γ
s
β
⎣
⎦
s
α
s
β
c
γ
+
c
α
s
γ
−
s
α
s
β
s
γ
+
c
α
c
γ
−
s
α
c
β
(9.5)
−
c
α
s
β
c
γ
+
s
α
s
γ
c
α
s
β
s
γ
+
s
α
c
γ
c
α
c
β
or using the more familiar notation:
⎡
⎤
cos
β
cos
γ
−
cos
β
sin
γ
sin
β
⎣
⎦
.
sin
α
sin
β
cos
γ
+
cos
α
sin
γ
−
sin
α
sin
β
sin
γ
+
cos
α
cos
γ
−
sin
α
cos
β
−
cos
α
sin
β
cos
γ
+
sin
α
sin
γ
cos
α
sin
β
sin
γ
+
sin
α
cos
γ
cos
α
cos
β
Comparing (
9.3
) and (
9.5
) it can be seen that they are completely different.
Let's evaluate (
9.5
) by making
α
=
β
=
γ
=
90°:
⎡
⎤
001
0
⎣
⎦
.
10
100
−
(9.6)
The matrix (
9.6
) is equivalent to rotating a point 90° about the fixed
z
-axis, fol-
lowed by a rotation of 90° about the fixed
y
-axis, followed by a rotation of 90° about
the fixed
x
-axis. This rotation sequence is illustrated in Fig.
9.5
(a)-(d).
From Fig.
9.5
(d) we see that the cube's coordinates are as shown in Table
9.3
.
We can confirm that these coordinates are correct by multiplying the cube's original