Image Processing Reference
In-Depth Information
y
x
ooooooooo
o
oooooooooooooooo
oooooo
oooo
ooo
ooo
oo
oo
.
Point #1
←
Point #3
Point #2
Point #6
Point #4
Point #5
Point #7
←
←
Point #8
Point #9
Point #10
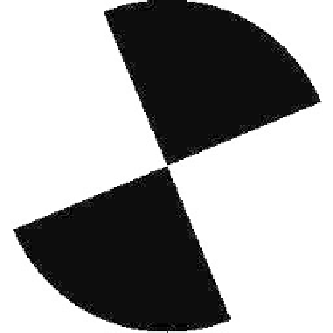
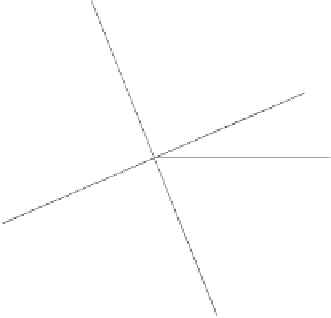
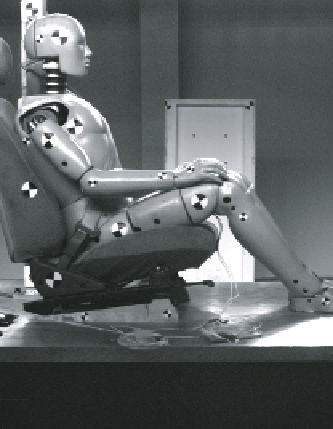
Fig. 11.7. Detecting cross markers and their direction in crash tests (from [23]). (
Top, left
)
The ideal model of a cross with
ϕ
π
8
.(
Top, right
)The
gray tones
change linearly with
the function sin(2
ϕ
)(
x
2
− y
2
)
−
cos(2
ϕ
)2
xy
, where
ϕ
=
=
π
8
.(
Bottom, left
) The first frame
of an image sequence with the tracked forward (
,
thin curve
)
trajectory of the cross attached to the head. (
Bottom, right
) The automatically identified crosses
◦
,
thick curve
) and backward (
·
have been oversampled, before pixelwise squaring is applied. Oversampling can be
effectively implemented by separable filters and pyramids [43].