Image Processing Reference
In-Depth Information
φ
j
r=[x,y]
T
b
b
j
j
B
)]
T
φ
φ
k=[cos(
), sin(
φ
φ
j
O
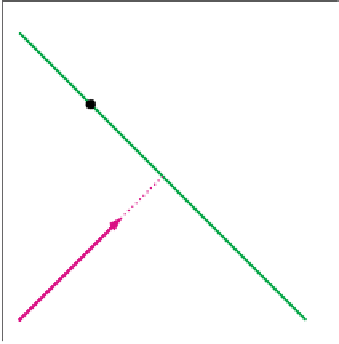
Fig. 10.33. (
left
) A common model of a line (
green
) to be used in the Hough transform of a
line is given by the vector
k
and the perpendicular distance of the origin to the line,
b
=
|
OB
|
.
(
right
) The discretized parameter space (
φ, b
j
) is shown. Edges in the (
x, y
) space cast votes
to cells in the (
φ
j
,b
j
) space
point generates the same line as the one generated by (
φ, b
). The accumulator will
then have two peaks for every line in the (
x, y
)-plane if no measures are taken. One
technique is to add the votes of one half of the (
φ, b
) plane to the respective cells in
the other half, which is equivalent to forcing
θ
(
x, y
) to the range [0
,π
].
10.16 The Structure Tensor and the Hough Transform
In this section we develop the Hough voting process to see that the structure tensor
averaging is a voting process too. The votes have tensor values, or equivalently com-
plex values, jointly encoding the line strength and the line direction continuously.
In case of strong coherence of local edge directions with the line model, both tech-
niques yield identical results. However, they differ when the local edge directions
are not consistent with the line model, because the tensor voting allows voting to
other candidates too. In that respect, the structure tensor voting can be likened to a
multiparty election that extends the single-party election, the
Hough transform
vot-
ing. The electors of the structure tensor voting are allowed to cast a vote even to the
opposition party, whereas the electors of the Hough transform are only offered to be
absent in case they disagree with the single party.
In Sect. 10.15, the nonuniqueness of lines w.r.t. the line direction was observed.
At first, this may appear as a technical problem that can be solved by using half of
the arc circle as angle parameter. However, there is a fundamental problem that is
not resolved by such an approach. This is because a numerical discontinuity at an
end of the interval [0
,π
] must be introduced since the angles 0 and
π
correspond
to the same line direction but differ maximally numerically. We suggest a different