Biomedical Engineering Reference
In-Depth Information
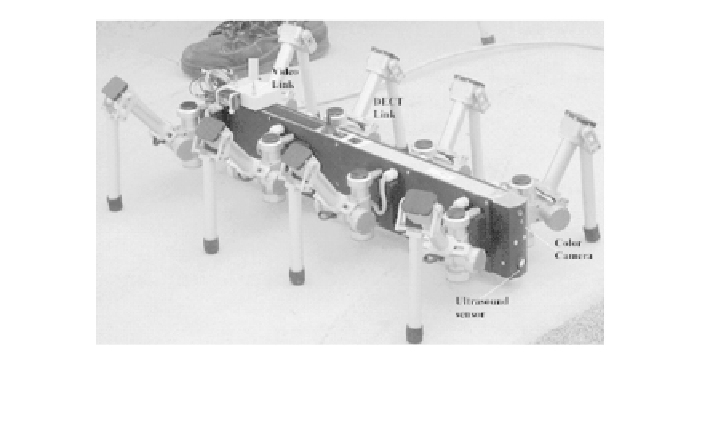
Figure 1
. The eight-legged robot "Scorpion."
to include higher-level principles of robot control such as planning and schedul-
ing algorithms. This combination of biologically robust low-level control with
high-level planning algorithms provides an interesting basis for many biomedi-
cal applications, from "Neuromorphic Systems" (see preceding chapter 6, by
Northmore, Moses, and Elias) to "Intraoperative Navigation" (see following
chapter 8, by Heilbrun).
2.
MECHATRONICS
The most challenging parts of a walking system are the legs (Figure 2). The
leg design presented here provides 3 degrees of freedom, which is the minimum
needed for a robust, outdoor walking robot, i.e., it provides the possibility for
omnidirectional walking even in narrow, difficult environments. The legs con-
sist of a thoracic joint for protraction and retraction, a basilar joint for elevation
and depression, and a distal joint for extension and flexion of the leg (Figure 2).
The joints are actuated by standard 6-W/24-V DC motors with a high gear
transmission ratio for sufficient lifting capacity.
Outdoor capability was an important constraint in the development process.
Therefore, a good tradeoff between lightweight design—to achieve maximum
lift capacity—and shielding against environmental influences (like dust and wa-
ter) had to be found. We achieved a weight of 950 grams and a weight:lift ca-
pacity ratio of 1:8. This proved to be sufficient for the system to walk up steep
inclinations and/or walk over obstacles higher than the robot itself. It also
proved to be important to integrate compliant elements in the mechanical design
in order to make the robot sufficiently robust to withstand the mechanical stress
of an outdoor terrain.