Graphics Programs Reference
In-Depth Information
state
M
4
M
3
M
2
M
1
τ
1
τ
2
τ
3
τ
4
time
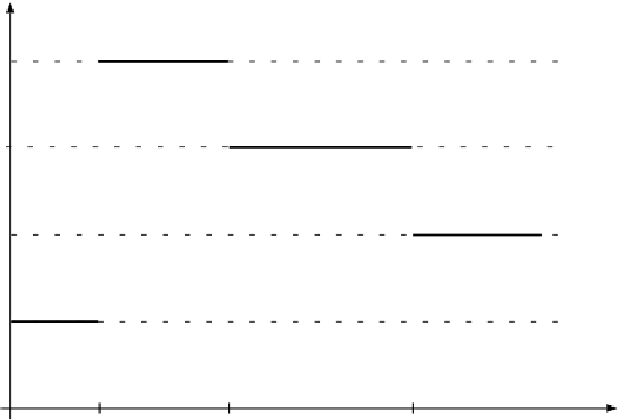
Figure 3.3: Pictorial representation of a timed execution
augmented with a set of nondecreasing real values describing the epochs of
firing of each transition.
Such a timed transition sequence is denoted as
follows:
[(τ
(1)
,T
(1)
);
···
; (τ
(j)
,T
(j)
);
···
]
The time intervals [τ
(i)
,τ
(i+1)
) between consecutive epochs represent the
periods during which the timed PN system sojourns in marking M
(i)
. This
sojourn time corresponds to a period in which the execution of one or more
activities is in progress and the state of the system does not change.
A
simple pictorial representation of a timed execution is given in Fig.
3.3.
3.2.1
Immediate transitions
As we noted before, not all the events that occur in a real system model
correspond to the end of time-consuming activities (or to activities that
are considered time-consuming at the level of detail at which the model is
developed). For instance, a model of a multiprocessor system described at
a high level of abstraction often neglects the durations of task switchings,
since these operations require a very small amount of time, compared with
the durations of task executions. The same can be true for bus arbitration
compared with bus use. In other cases, the state change induced by a specific
event may be quite complex, and thus di
cult to obtain with the firing of a

Search WWH ::

Custom Search