Geology Reference
In-Depth Information
In the z-transform domain it can be written as
A
ð
z
Þ
Y
ð
z
Þ
¼
B
ð
z
Þ
U
ð
z
Þþ
E
ð
z
Þ
ð
4
:
10
Þ
where
X
p
a
j
z
j
A
ð
z
Þ
¼1
þ
ð
4
:
11
Þ
j¼1
and
q
þ
X
d
1
a
k
z
k
B
ð
z
Þ
¼
ð
4
:
12
Þ
k¼1
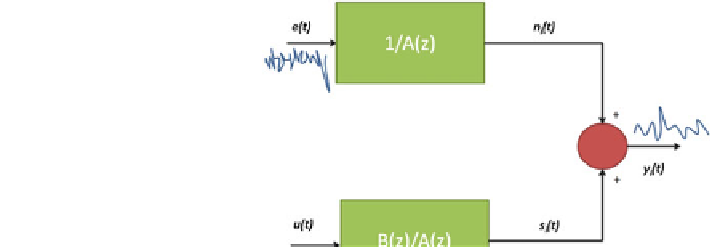
Y(z), U(z), and E(z) are the z-transform of y(k), u(k), and e(k). The ARX model,
shown in Fig.
4.1
, is one of the simplest available models which incorporates the
stimulus signal. The estimation of the ARX model is one of the most ef
cient
polynomial estimation methods because linear regression equations are solved in
analytic form and the solution always satis
es the global minimum of the loss
function. The ARX model gains more acceptance if the model order is high. The
disadvantage of the ARX model is that it does not include disturbance dynamics.
4.1.6 AutoRegressive Moving Average with EXogenous Input
(ARMAX) Model
The major difference between the ARMAX (Fig.
4.2
) model and ARX is that its
structure includes disturbance dynamics, and this model
cient in
tackling the dominating disturbances (input) in the system which enter early in the
process. For example, a wind gust affecting an aircraft is a dominating disturbance
early in the process. The normal notation is ARMAX (p, q, and r) which means the
is always ef
Fig. 4.1 Block diagram of
ARX model