Biology Reference
In-Depth Information
Errors local to a landmark and the association of errors between
landmarks and along directions are calculated as variances and covari-
ances and can be collected in a matrix form. For the definitions of
variance and covariance, the reader may refer to any elementary
statistics textbook, (e.g., Rosner, 1995).
Let us start with a simple situation of three landmarks on a two
dimensional object. In this case, the true landmark coordinate matrix
M
is a 3 by 2 matrix. There is measurement error associated with each
landmark along each direction.
Focusing only on the X direction, let us define
V
V
V
X
,
11
X
,
12
X
,
13
V
V
V
V
X
X
,
12
X
,
22
X
,
23
V
V
V
X
,
13
X
,
23
X
,
33
where
V
X,11
, V
X,22,
and
V
X,33
are the variances representing measure-
ment errors in the X direction for landmarks 1, 2, and 3 respectively;
V
X,12
is the covariance between errors in the X direction for landmarks
1 and 2,
V
X,13
is the covariance between errors in the X direction for
landmarks 1 and 3, and
V
X,23
is the covariance between errors in the X
direction for landmarks 2 and 3. Notice that the matrix
V
X
is a square,
symmetric matrix, and that there are only six distinct entries.
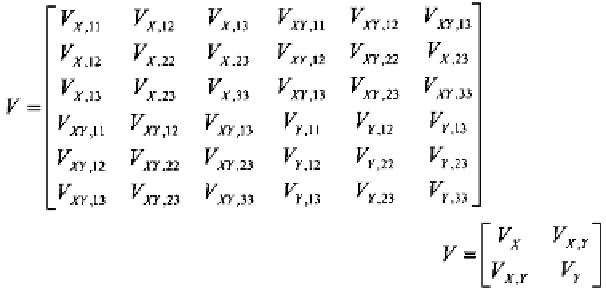
Similarly, we can write the variance matrix
V
Y
for the errors in the Y
direction. The covariance matrix representing errors between the X
and Y directions is written as
V
X,Y
. Each of these is a 3 by 3 square,
symmetric matrix. These matrices can be combined to form a new 6 by
6 matrix,
.
This matrix is sometimes written in a shorter form as
.


Search WWH ::

Custom Search