Biology Reference
In-Depth Information
Landmark coordinate data, for both computational and statistical pur-
poses, are most conveniently represented as a matrix. Suppose
landmarks are collected from a three dimensional biological object. A
typical “observation,” a series of landmark coordinates obtained by the
matrix form as described below.
For the sake of simplicity, instead of using proper biological names
of the landmarks, we index them from 1 to
K
. It is assumed that a
proper record of the correspondence between the biological nomencla-
ture and the index is maintained consistently throughout the study.
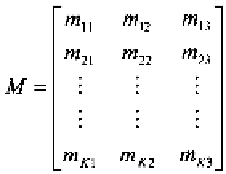
The landmark coordinates of a three dimensional,
K
landmark
object are written as a
K
3
matrix as follows:
where the first row corresponds to the X, Y, and Z coordinates of land-
mark 1, the second row corresponds to the X, Y, and Z coordinates of
landmark 2, and so on.
Thus
M
is a matrix with
K
rows and 3 columns with each row rep-
resenting the X, Y, and Z coordinate values of the corresponding
landmark. We say that
M
is a
K
by 3 matrix.
M
is called a
landmark
coordinate matrix
. For a two-dimensional object where only X and Y
coordinates exist for each landmark, the landmark coordinate matrix
is a
K
by 2 matrix.
Throughout this monograph, we use the letter
K
to denote the num-
ber of landmarks, and letter
D
to denote the number of dimensions of
the object, unless specified otherwise. The dimension
D
is typically
either 2 or 3. In general, a landmark coordinate matrix is a
K
by
D
matrix of real numbers.
The next question we ask is: what happens to the landmark coordi-
nate matrix of a given object if we rotate (spin around a point) or
translate (shift) the object? The rotation and translation of objects can
be described using matrix algebra. This requires a few more definitions.
a)
An identity matrix
: An identity matrix is a square matrix with
diagonal elements equal to 1 and all the other elements equal
to 0. An identity matrix is denoted by
I
.


Search WWH ::

Custom Search