Geoscience Reference
In-Depth Information
object surrounding the ditch pattern (e.g. a road); this is equivalent as con-
straining the new ditches to a minimum distance from these objects.
Once that the presence of constraining objects is found, the algorithm tries
to find a better position for the ditches: this is done with a simple iterative
procedure that shifts
n
times the pattern along the line
L
of a measure
SP/n
,
trying to minimize the intersection between the ditches and the constrain-
ing objects. The parameter
n
is set by the user and could be set as
SP/n
be-
ing smaller than the map tolerance. If the minimum number of intersec-
tions is different from 0, the algorithm uses these objects to crop the new
pattern.
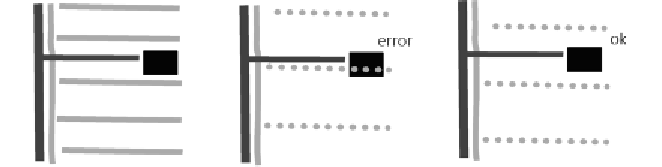
Figure 6:
the placement of the new pattern is decided evaluating the position of eventual
occluding objects, e.g. buildings; in the figure above, from left to right: original situation,
wrong placement of the new pattern (gray dots) as one ditch collides with the building
(black), correct placement of the new pattern, obtained moving down the pattern.
To obtain a better result the crop can be done applying a small buffer
around the objects, in a similar way to what is done in maps with the
application of a halo around names or objects to emphasize.
4- Results and future work
The algorithm was tested on two datasets, one comprising a mountainous
territory, the other a plain, the latter being more rich of ditches. In both
cases the algorithm produced good results, reducing the number of ditches
and creating uniform patterns.