Environmental Engineering Reference
In-Depth Information
ist und zum feststehenden
ÆØ
-System den zeitabhängigen Winkel
µ
=
µ
(
t
) aufweist, transfor-
miert.
U
dq
(
t
)
=
U
ÆØ
(
t
)
·
e
j µ
(
U
dq
;
U
ÆØ
)
=
U
d
(
t
)
+
jU
q
(
t
)
=
U
ÆØ
(
t
)(cos
µ
+
j
sin
µ
)
(8.74a)
U
d
(
t
)
=
U
Æ
(
t
)cos
µ
+
U
Ø
(
t
) sin
µ
(8.74b)
U
q
(
t
)
=°
U
Æ
(
t
)cos
µ
+
U
Ø
(
t
) sin
µ
(8.74c)
Die Rücktransformation lautet:
U
Æ
(
t
)
=
U
d
(
t
)cos
µ
°
U
q
sin
µ
(8.75a)
U
Ø
(
t
)
=
U
d
(
t
) sin
µ
+
U
q
cos
µ
(8.75b)
Die Transformation erfolgt mit dem Drehoperator e
j µ
(
U
dq
;
U
ÆØ
)
. Die Besonderheit der Darstel-
lung in einem rotierenden Koordinatensystemwird an Bild
8.42
deutlich.
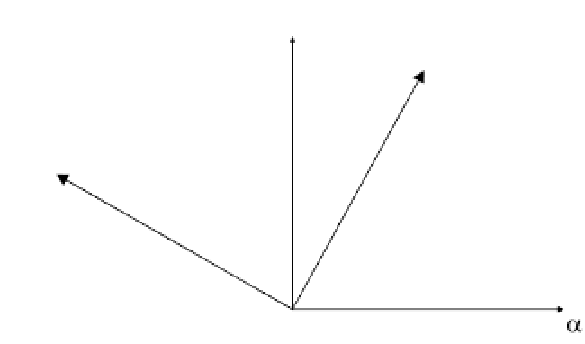
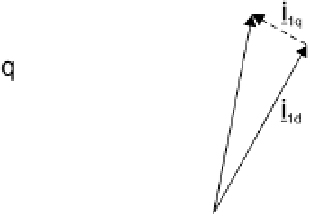
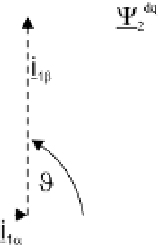
Bild 8.42
Rotorflussverkettung und
Statorstrom im statorfesten
ÆØ
- so-
wie im rotorflussorientierten dq-
Koordinatensystem und Aufteilung
des Ständerstroms in diese Kompo-
nenten
Die dreiphasigen Gleichungen für den Ständerstrom
I
1
werden als erstes für diese Darstel-
lung in die komplexe Raumzeigergleichung für das statorfeste
ÆØ
-Koordinatensystem trans-
formiert. Als nächstes wird das rotorflussorientierte Koordinatensystem ausgewählt, in dem
die Regelung ausgeführt werden soll. In diesem Fall wird die d-Komponente auf den Rotor-
stromwird in dieses Koordinatensystem transformiert. Er kann dementsprechend in die Kom-
ponenten
i
1d
,
i
1q
in beiden Achsen, also Längskomponente in Richtung des Rotorflusses und
die Querkomponente senkrecht dazu, aufgeteilt werden. Dies ist eine für die Regelung sehr
günstige Darstellung, da der Längsanteil des Ständerstroms den Fluss und der Queranteil das
Moment bildet, was die später folgende Momentengleichung
8.79a
zeigt. Diese Werte können
direkt in der Regelung verwendet werden und bilden die bereits dargestellten zwei Kanäle.
Es ist von großem Vorteil, dass bei Regelung in rotierenden Koordinatensystemen die Größen
bei stationärem Betrieb Gleichgrößen sind und die Regelung damit leicht realisierbar ist. Ein
Beispiel dafür sind Flüsse und Ströme in Bild
8.42
für das rotorflussorientierte Koordinaten-
system. Regelungen für Drehstrommaschinen können aber auch in anders orientierten Koor-
dinatensystemen realisiert werden, zum Beispiel bezogen auf die Statorflussverkettung. Auch
eine Darstellung im statorbezogenen System, also im
ÆØ
-System, kann verwendet werden.
Die Gleichungen für die Ständer- und Rotorspannung und die entsprechenden Flüsse bei Mo-
dellierung für dynamisches Verhalten des Asynchrongenerators können aus den bekannten