Environmental Engineering Reference
In-Depth Information
dq
d q
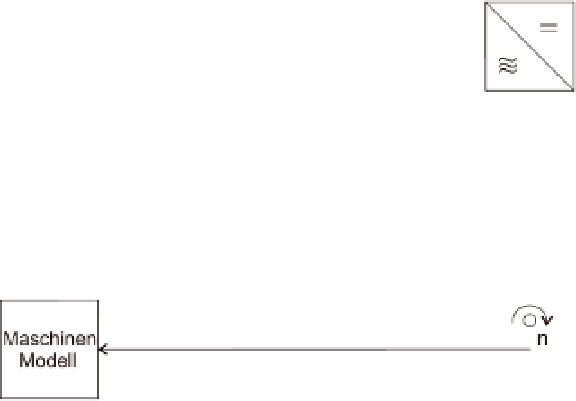
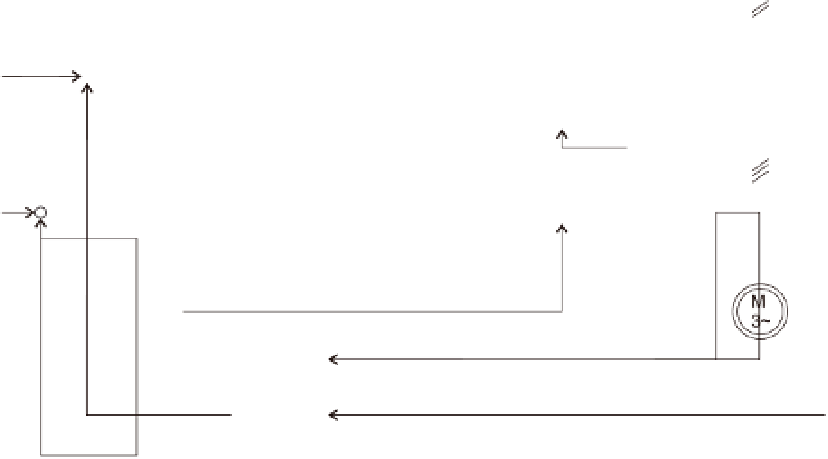
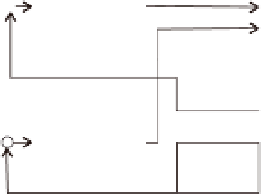
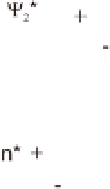
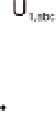
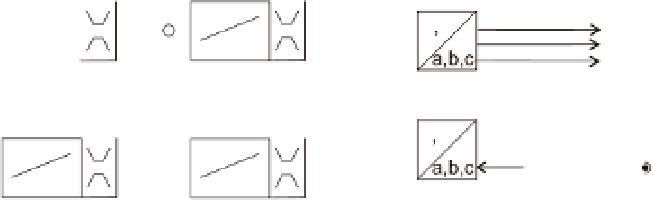
Bild 8.41
Strukturbild der Regelung eines Asynchrongenerators mit Kurzschlussläufer (feldorientierte
Regelung von Rotorflussverkettung und Drehzahl, mit Drehzahlgeber)
zum Beispiel die Rotorflussverkettung ™
2
, geregelt wird, und ein Kanal, mit dem die Drehzahl
N
bzw. alternativ das Moment
M
geregelt werden. Zudem ist die Regelung kaskadiert gestaltet,
indemeine untergeordnete Stromregelung verwendet wird. Dies hat Vorteile, dadurch dass die
jeweiligen Regler auf die jeweiligen Streckenteile eingestellt werden können und zudem eine
Begrenzung des Stromsollwerts möglich ist, um die Umrichter zu schützen.
Der Istwert der Rotorflussverkettung™
2
und deren Sollwert ™
§
2
werden verglichen und die Dif-
ferenz auf den PI-Flussregler gegeben. Dieser hat die Aufgabe, über seinen Ausgang das System
so zu beeinflussen, dass Soll- und Istwert sich angleichen. Der Ausgang des Flussreglers ist der
Sollwert für den flussbildenden Strom
i
§
1d
. Dieser kann begrenzt werden. Er wird mit dem er-
mittelten Istwert verglichen und die Differenz auf den PI-Regler für den flussbildenden Strom
gegeben und geregelt. Dessen Ausgangswert ist die flussbildende Sollgröße
U
1d
der Ständer-
spannung. Der Kanal für die Drehzahlregelung ist entsprechend aufgebaut. Eingangsgrößen
sind die Signale Drehzahlsollwert und -istwert
n
, Zwischenstufe ist der momentenbildende
Strom
i
1q
mit Sollwert und Istwert sowie Ausgangsgröße der momentenbildende Anteil
U
1q
der
Ständerspannung. Die beiden Spannungsanteile werden zur Gesamtspannung zusammenge-
fügt und geben den Spannungssollwert in Betrag und Winkel für die Pulsweitenmodulation
des generatorseitigen Umrichters vor. Im Pulsweitenmodulator, der hier als Bestandteil des
Umrichters gesehen wird und nicht einzeln im Bild aufgeführt ist, werden die Schaltmuster
für den Umrichter berechnet, um den geforderten Ausgangsspannungswert zu stellen.
Für die Regelung benötigte Istwerte sind der Ständerstrom, die Ständerspannung und die
Drehzahl. Interne Größen der Maschine, die für die Regelung benötigt werden, wie die Ro-
torflussverkettung im Betrag ™
2
und deren Winkel
'
™
2
sowie das Moment
M
, falls benötigt,
werden mithilfe eines Maschinenmodells berechnet. Dies enthält die Gleichungen der Ma-
schine. Damit wird eine problematische Flussmessung und Momentenmessung vermieden.