Environmental Engineering Reference
In-Depth Information
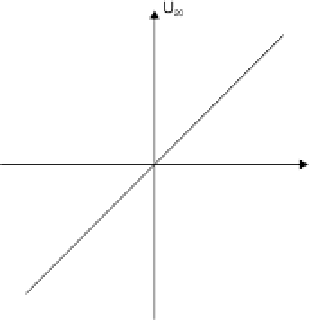
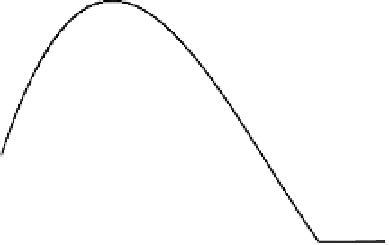
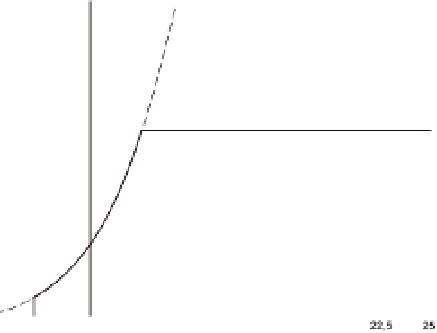
Bild 8.25
Drehzahlvariabler Betrieb der Asynchronmaschine mit Schleifringläufer (doppeltgespeiste
Asynchronmaschine); links: Steuerkennlinie für die Rotorspannung im Leerlauf mit
U
RB
=
0
, rechts: Be-
triebsbereich im Leistungs-Drehzahl-Diagramm; typischer Bereich für Windenergieanlagen:
°
0,3
f
1
<
f
2
<+
0,3
f
1
; 4m/s
<
n
rot
< 10m/s
in Bild
8.25
dargestellt ist. Der Verlauf ist linear. Typisch für Windenergieanlagen ist ein Be-
triebsbereich der Rotorfrequenz von
°
0,3
f
1
bis
+
0,3
f
1
.
Es ergeben sich Drehmoment-Drehzahl-Kennlinien wie bei der Synchronmaschine. Für eine
feste Rotorspeisefrequenz ergibt sich eine feste Drehzahl. Bei dieser frei wählbaren Drehzahl
kann ein beliebiges Moment im zulässigen Bereich aufgebracht werden.
8.5 Synchronmaschinen
Synchronmaschinen kommen auf verschiedenen Gebieten zum Einsatz. Sie können bis zu
größten Leistungen im GW-Bereich gebaut werden und weisen die Eigenschaft auf, Blindleis-
tung gesteuert einspeisen zu können. Aus diesen Gründen werden sie generell in Kraftwerken
eingesetzt. Andererseits ist dieser Maschinentyp aber auch imBereich kleiner Leistung imEin-
satz, so bei Werkzeugmaschinen oder bei Geräten der Unterhaltungsindustrie oder Druckern.
In Windenergieanlagen wird die Synchronmaschine schon seit langem verwendet, früher nur
die fremdgespeiste Variante, heute zunehmend auch mit Permanentmagneterregung.
8.5.1 Generelle Funktion
Für die Einführung der Maschine wird die Variante mit Fremderregung zugrundegelegt. Der
Rotor dieser Variante der Synchronmaschine ist mit einer Gleichstromwicklung ausgestattet
und wirdmit Gleichstrom gespeist. Dies geschieht über einen Stromrichter, der den Feldstrom
regelt. Der Strom wird über Schleifringe auf den Läufer gegeben. Es ergibt sich im Rotor ein
Gleichfeld, das fest zum Rotor liegt. Dieses Feld kann stattdessen auch durch Permanentma-
gnete erzeugt werden.