Digital Signal Processing Reference
In-Depth Information
y(i)
Far End
A
Echo
Canceller
Near End
x(i)
^
r(i)
−
Noise
Suppressor
+
B
s(i)
z(i)
+
x(i) + r(i) + n(i)
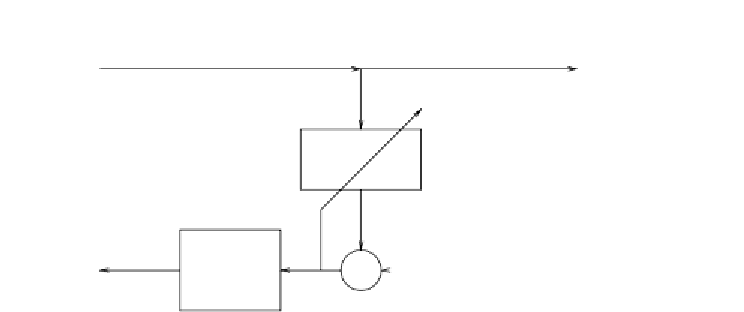
Figure 11.25
Block diagram of cascaded echo cancellation and noise suppression
usually distorts the echo signal in a nonlinear manner, which may make echo
cancellation more difficult. By placing the noise suppressor after the echo
canceller, to remove the residual echo error as well as noise, may therefore be
more appropriate as shown in Figure 11.25.
The performance of this set-up has been tested both subjectively and
objectively. Subjective testing was carried out through informal listening
tests, while objective testing was conducted through various filter coefficient
convergence behaviours. Two different echoes were used for this purpose.
The first was a simple echo resulting froma single delay and attenuation of the
far-end speech signal and the second was the sum of three different delayed
and attenuated versions of the far-end speech. Each echo was mixed with the
near-end speech signal along with vehicle noise contamination resulting in
SNRs of 0, 5, 10, 15 and 20 dB.
Results obtained using the simple echo case are shown in Figures 11.26-
11.31. The echo was generated by delaying the far end speech by 40 samples
and attenuated through a factor of 0.48. Part (a) of Figures 11.26-11.31 shows
the input to the cascaded system and the corresponding output signals and
part (b) shows the convergence track of filter coefficients
h
40
and
h
0
.The
robustness of the system under noisy conditions and the convergence of the
filter coefficients (
h
40
and
h
0
), even in the presence of near-end speech, are
quite evident in Figures 11.26-11.31. Note that, as also highlighted above,
neither a near-end speech detector nor a switch for filter coefficient adaptation
is needed. All that is needed is an initial training period for which the
w
k
(i)
are set to one. In this setup, the initial period is 1 second for which the near-
end speech is assumed to be absent. The weighting function is switched on
after that and is responsible for convergence of the filter coefficients during
near-end speech presence and silences in the near-end signal. Based on the
average track of each filter coefficient (i.e.
h
k
(i)
) and the selection of the
γβ
value in the
w
k
(i)
definition, only the step changes that follow the average


Search WWH ::

Custom Search