Digital Signal Processing Reference
In-Depth Information
+
+
C
H
A
N
N
E
L
−
Echo
Echo
Canceller
Canceller
Hybrid
Hybrid
−
+
+
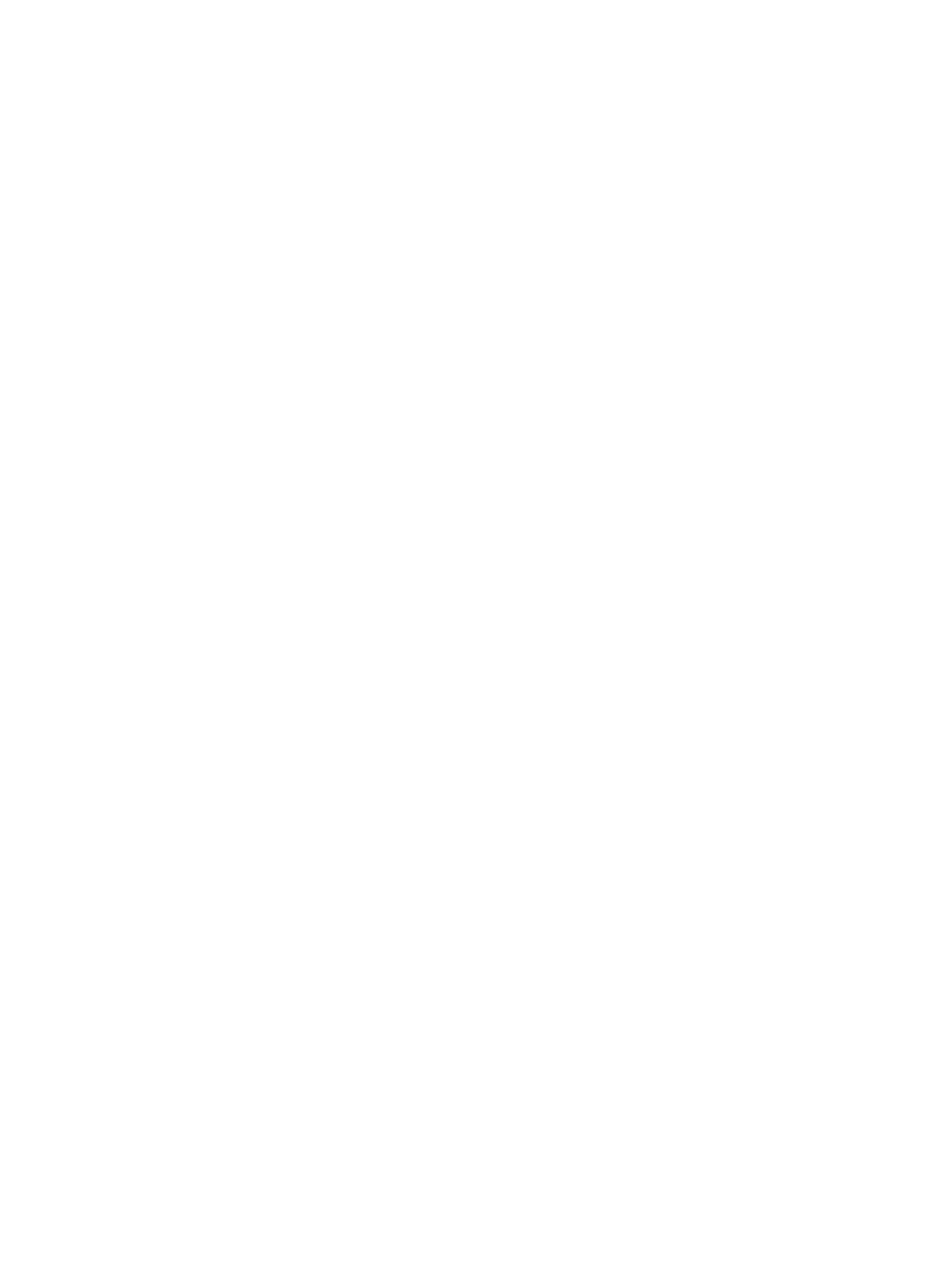
Figure 11.24
Block diagram showing echo cancellation applied to both ends
In practice, echo cancellers are applied on both ends to cancel the echoes in
each direction as shown in Figure 11.24. An echo canceller should, in general,
satisfy the following fundamental requirements:
•
Rapid convergence of the filter coefficients when turned on.
•
Very low echo when there is no near-end speech.
•
Slow divergence when there is no far- or near-end speech.
•
Little divergence when both near- and far-end signals are present.
The ITU-T G.165 recommendations [22], which summarize the above require-
ments, are as follows:
•
After convergence with no near-end speech, with input noise level between
−
10 dBm0 and
−
30 dBm0, final echo return loss (ERL) should be
−
40 dB.
•
After 500ms of first start up, the parameters should converge to give at
least 27 dB echo reduction with no near-end speech.
•
Degradation of residual echo after 2minutes from the time all signals are
removed from the fully-converged canceller should not bemore than 10 dB.
•
The returned echo level, 500ms after interruption of the echo path, should
reach
−
40 dBm0.
11.4.2 EchoCancellationFormulation
An echo canceller can be split into the following parts: adaptive transversal
filter, near-end speech detection, and residual error suppression.
Adaptive Transversal Filter
In a digital echo canceller both the reference and echo signals are available in
digital form. Therefore the echo path impulse response can be represented in
digital form by
a
k
,
N
−
1
r(i)
=
a
k
y(i
−
k)
(11.53)
k
=
0







Search WWH ::

Custom Search