Digital Signal Processing Reference
In-Depth Information
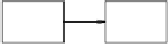
Sampling Rate
Expander
Low-pass
Filter
s(n)
s
up
(m)
U
h(m)
Polyphase
Filter
s
0
(n)
s(n)
p[0](n)
m
=
0
Commutator
s
1
(n)
s
up
(m)
p[1](n)
p[U
−
1](n)
s
U−1
(n)
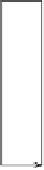
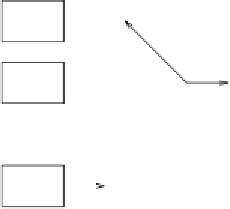
Figure 7.14
Polyphase structure for implementing interpolation
to
s
up
(m)
is illustrated in Figure 7.14 where
U
is the up-sampling factor and a
polyphase structure is used.
From the up-sampling procedure a noninteger lag value of
(D
+
d/U)
at
sampling rate
f
s
now corresponds to an integer delay of
(UD
+
d)
where
d
1atarateof
Uf
s
. Therefore, to implement a delay of
noninteger values, one simply takes the appropriate branch of the polyphase
structure of the interpolation filter (see Figure 7.14). An important aspect of
the interpolation process is the choice of the low-pass filter both in terms of
performance and complexity. As suggested by Kroon in [18], a simple but
effective filter design is to use a Hamming windowed sin
(x)/x
design, which
has three advantages:
=
0
,
1
, ... ,U
−
1. The resultant FIR filter has exactly linear phase and a fixed delay.
2. The characteristics of the filter are adequate with only a short filter length,
i.e. the aliasing components are small.
3. The original signal can be obtained without any phase-shift, i.e. the top
branch of the polyphase structure in Figure 7.14. This means that the
number of filtering operations is decreased as the top branch is effectively
just a delay operation.
In order to obtain the above advantages, the filter length
N
must be chosen
such that the filter delay,
(N
−
1
)/
2, at sampling rate
Uf
s
is an integer multiple
of
U
,i.e.
N
=
2
IU
+
1
(7.46)
where
I
is the delay of the low-pass filter at sampling rate
f
s
.


















Search WWH ::

Custom Search