Digital Signal Processing Reference
In-Depth Information
y
y
y
CL
1
−CL
−CL
−CL
CL
x
CL
x
CL
x
−
CL
−
1
y
=
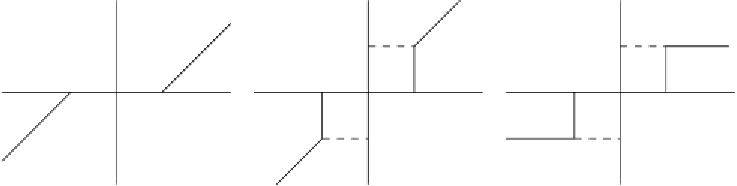
clc(x)
y = cpl(x)
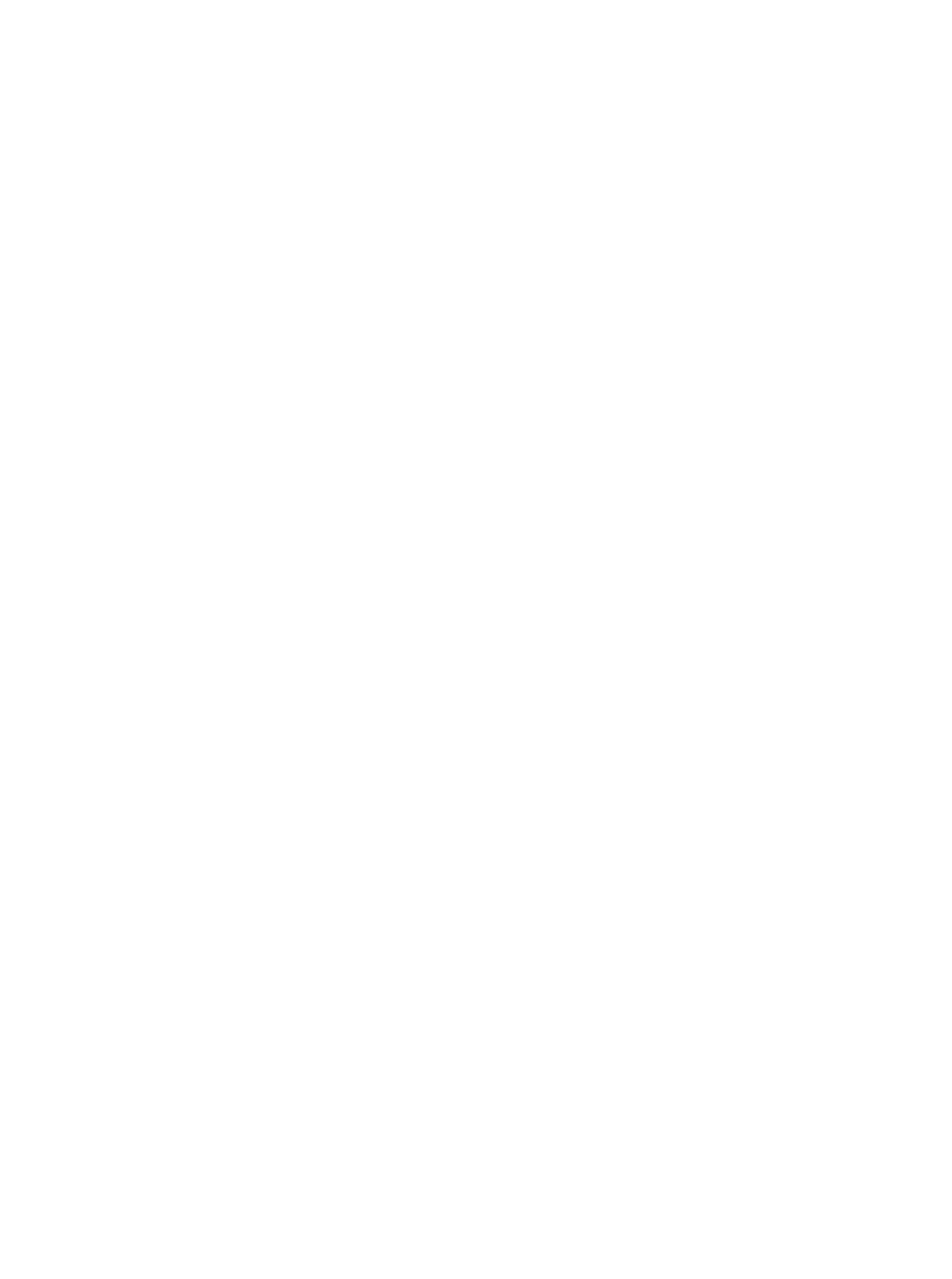
y = sgn(x)
Figure 6.17
Clipper functions
x
;−
CL
≥
x
≥
CL
=
=
y
clp(x)
(6.30)
0
;−
CL > x < CL
1
;
x
≥
CL
y
=
sgn(x)
=
−
1
;−
CL
≥
x
(6.31)
0
;−
CL > x < CL
The centre clipped signal
y(n)
is generally defined as:
y(n)
=
f
[
s(n)
]
(6.32)
The clipper function
f
[
.
] can be any one of the functions in equations
(6.29) - (6.31). For the autocorrelation method, the clipped autocorrelation
function
R
c
(τ )
is defined as:
−
−
N
1
N
1
R
c
(τ )
=
y(n)y(n
+
τ)
=
f
[
s(n)
]
f
[
s(n
+
τ)
]
(6.33)
n
=
0
n
=
0
More generally, these two clipper functions can have any combination, e.g.
N
−
1
R
c
(τ )
=
f
1
[
s(n)
]
f
2
[
s(n
+
τ)
]
(6.34)
n
=
0
A set of typical combinations of
f
1
(n)
and
f
2
(n)
are listed in Table 6.1. It has
been shown that[3, 16]:
•
For high-pitch speakers, the differences in performance scores between the
various clipping combinations are small and probably insignificant.
•
For low-pitch speakers, fairly significant differences in performance scores
exist. Combination 1 in Table 6.1 gives the worst performance for all
utterances in this class. Combinations 4, 5, and 6 (those involving one
unprocessed component) are also poor in their overall performances.

Search WWH ::

Custom Search