Geology Reference
In-Depth Information
To calculate the angular frequency of preces-
sion, we observe that:
dL
D
L sin ™d¥
(3.19)
where ™ is the angle between
L
and
B
and
d
¥ is
the infinitesimal angle of precession. Combining
(
3.19
) with (
3.18
) we obtain:
d¥
dt
D
eB
2m
e
¨
L
D
(3.20)
This quantity, which is independent from the
angle ™, is known as the
Larmor angular fre-
quency
. The precession of the magnetic and an-
gular moments around the magnetic field vector
is the basic principle underlying the construc-
tion of
proton precession magnetometers
,which
form an important class of
scalar magnetometers
.
These devices furnish measurements of the
mag-
nitude
of the Earth's magnetic field. We shall see
that these are the raw data of plate kinematics.
The operation of these instruments is based on
the proportionality between Larmor frequency
and magnitude of the external field predicted
by Eq. (
3.20
), so that a measurement of fre-
quency can be converted to a measurement of
field intensity.
We have seen that current loops are subject to
the action of external magnetic fields. However,
a current loop generates itself a special kind of
magnetic field that is called
dipole field
, whose
structure is illustrated in Fig.
3.6
. We note that
in this case the field lines are arranged symmetri-
cally with respect to the direction of
m
(dipole
axis). The dipole field describes with good ap-
proximation the present day Earth's magnetic
field, which will be considered in the next chap-
ter, and with excellent approximation the
paleo-
generate these fields are referred to as
magnetic
dipoles
. To obtain an expression for
B
, we choose
a coordinate system with the
z
-axis aligned in the
direction of
m
and with the origin placed at the
centre of the current loop. At great distance, the
magnetic field generated by this magnetic dipole
has the following approximate expression (e.g.,
Panofsky and Phillips
2005
):
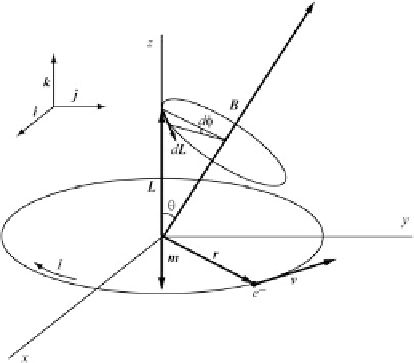
Fig. 3.5
The counterclockwise rotation of an electron
about the
z
axis is equivalent to a coil crossed by a current
flowing in the opposite direction. If the direction of the
external magnetic field
B
does not coincide with that of
the magnetic moment associated with the current loop,
m
,
then the orbit is perturbed and the angular momentum
L
will be subject to a precession about the direction of
B
Thus, the orbital motion of the electron gener-
ates a current loop, whose strength of interaction
with the external magnetic field is described by
the magnetic moment
m
. Since the electron has
negative charge, in this case the vector
m
will be
opposite to the angular momentum
L
associated
with the orbit. Therefore, if
m
e
is the electron
mass and
L
D
r
m
e
v
is its angular momentum,
then:
1
2
e
v
rL
D
1
2
er
v
m
D
r
2
IL
D
e
2m
e
L
D
(3.17)
The ratio -
e
/2
m
e
is called
classic gyromag-
netic ratio of the electron
. Combining (
3.17
) with
(
3.15
), we obtain a simple expression for the
torque exerted on the electron orbit:
d
dt
D
e
2m
e
L
B
N
D
(3.18)
Therefore,
d
L
?
L
. This implies that the angu-
lar momentum
L
, and consequently the magnetic
moment
m
, precesses about the vector
B
,as
showninFig.
3.5
.